В целом компоновку робота-пылесоса Clever&Clean V-Series 001 можно назвать «классической», но его отличает наличие двух одинаковых щеток, расположенных V-образно. Способствует ли такая конфигурация щеток повышению качества уборки, достоверно определить не представляется возможным, так как нет (по крайней мере, у нас) точно такого же робота, но с обычной щеткой, ориентированной перпендикулярно направлению движения. В любом случае, на некоторую долю оригинальности этот агрегат претендовать может.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора пыли | Раздельно инерционное перемещение и вакуумная фильтрация |
| Пылесборник | 0,4 л, два отделения, встроенный отделяемый вентилятор |
| Основная щетка | Две с ворсом, расположенные V-образно |
| Боковые щетки | Две |
| Дополнительно | Резиновый скребок-юбка |
| Режимы очистки | Обычный 10—120 минут, ручное управление, уборка по расписанию |
| Датчики препятствий | Механический передний/боковой бампер, ультразвуковые датчики приближения, ИК-датчики перепада высоты |
| Датчики ориентации | Ультразвуковые датчики поиска базы и определения виртуальных стен, радичастотная коммуникация с базой и виртуальными стенами, датчики вращения ведущих колес |
| Управление на корпусе | Механические кнопки |
| Дистанционное управление | Радиочастотный (2,4 ГГц) пульт ДУ |
| Оповещение | Светодиодная индикация, звуковые сигналы и ЖК-дисплей на базе |
| Время автономной работы | До 120 мин |
| Время зарядки | 4 часа |
| Способ зарядки | На зарядной базе с автоматическим возвратом или прямая зарядка от БП |
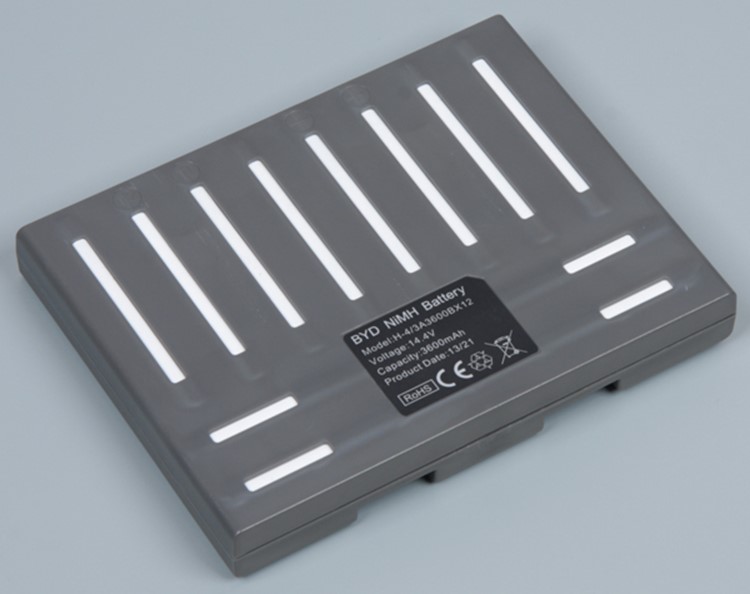
| Батарея | Ni-MH 14,4 В, 3600 мА·ч |
| Потребляемая мощность | Нет данных |
| Масса | 3,9 кг |
| Размеры (диаметр×высота) | 330×80 мм |
| Особенности | УФ-лампа для дезинфекции пола, работа с виртуальными стенами, 5 вариантов движения, бесконтактный режим уборки, уборка с отключенным вентилятором |
| Комплект поставки* |
*Комплект поставки лучше уточнять перед покупкой. |
| Ссылка на сайт производителя | www.cleverclean.ru |
| Цена на сайте производителя на момент написания статьи | 11 990 руб. |
Внешний вид

Пылесос в плане имеет идеально круглую форму.

Края немного скошены, притом снизу чуть больше. Скос снизу поможет преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом. Корпус пластиковый с матовой поверхностью. Есть два варианта пылесосов Clever&Clean V-Series 001: черный и белый. На тестировании у нас побывали оба. У обоих днище темно-серое. У черного остальная часть корпуса матовая и черная, у белого — в основном матовая и белая. Кроме того, черный вариант отличается наличием кольцевой ламинированной накладки на верхней панели. У белого варианта эта накладка имеет серебристое покрытие (легко царапающееся), такое же покрытие и в центральной части верхней панели. Под цвет корпуса — черный или белый — выполнены и остальные составляющие комплекта: база, виртуальная стена и пульт ДУ.

Черный вариант смотрится лучше, но на полу (и под предметами мебели) белый робот обычно заметнее, что имеет свои преимущества. Сверху ближе к передней части в корпусе есть ниша с заходом под кольцевую накладку. Эта ниша образует ручку, за которую пылесос удобно переносить. В центральной части верхней панели присутствует неглубокая выемка овальной формы, в которую вкладывается пульт ДУ. Благодаря магнитным фиксаторам пульт из ниши не выпадает, например, при переноске робота.

Перед нишей для пульта располагаются две механические кнопки с подсвечивающимися синим цветом значками, сегментный светодиодный индикатор зеленого свечения и четыре индикатора состояния с синей подсветкой. За металлической сеточкой на переднем бампере можно разглядеть ультразвуковые датчики поиска базы и дистанционного обнаружения препятствий.

Еще парочка таких датчиков находится на боковой поверхности корпуса ближе к задней части робота. На левом боку больше ничего интересного. На правом боку находятся разъем питания для зарядки минуя базу.

Сзади — решетка пылесборника, через которую выдувается воздух.

Кнопка, снимающая фиксацию пылесборника, расположена сверху. Перевернув пылесос вверх днищем, мы увидим две контактные площадки, подруливающий ролик, две боковые щетки, две основные щетки, расположенные V-образно, два ведущих колеса, всасывающую прорезь в обрамлении резиновой юбки-скребка, нишу с УФ-лампой и нижнюю «выхлопную» решетку вентилятора.
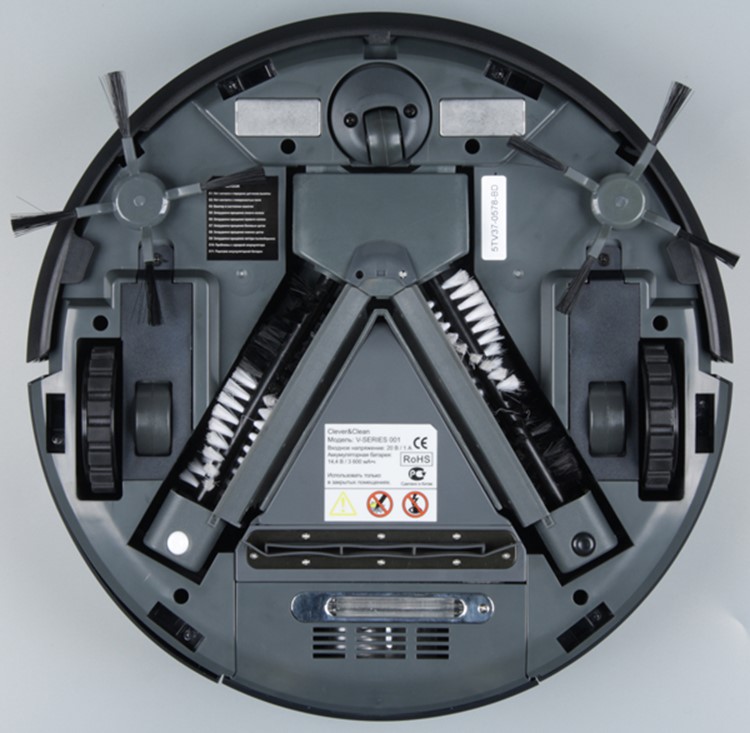
По периметру днища ближе к краю расположены шесть ИК-датчиков перепада высоты.

База, на которой пылесос подзаряжается, имеет внешний блок питания, поэтому она относительно небольшая и легкая. (Длина кабеля от БП — 150 см.)

Снизу на днище базы приклеена узкая полоска из поролона.

Для надежной фиксации базы этого, конечно же, мало, но устойчивость у базы и так хорошая, а при необходимости всегда можно наклеить резиновые площадки или просто закрепить базу на полу с помощью двусторонней клейкой ленты. Преимуществ от использования внешнего БП как минимум два: во-первых, в случае выхода из строя менять/ремонтировать можно только БП, а не базу целиком, и, во-вторых, пылесос можно подзаряжать напрямую от БП, для чего на корпусе пылесоса предусмотрен разъем питания. Недостаток как минимум один — база легче, что повышает вероятность ее смещения. Сзади на корпусе базы есть желобок с зацепами — кабель питания можно зафиксировать и вывести вправо или влево.

Кроме того, сзади на базе закреплен кольцеобразный инструмент для очистки щетки. А сбоку (движком сзади) выдвигается штекер, предназначенный для подзарядки аккумуляторов в виртуальной стене. Спереди на базе находятся подпружиненные контакты, прямоугольник из упругого материала для смягчения удара пылесоса о базу и два ультразвуковых маячка, направляющих робота на базу.

На верхней панели базы расположены шесть кнопочек с едва различимыми обозначениями и относительно крупный ЖК-дисплей без подсветки. Кнопки и дисплей в основном служат для установки текущего времени и задания расписания уборки.
К пылесосу прилагается небольшой радиочастотный пульт ДУ овальной формы.

Обозначения кнопок относительно крупные и в черном варианте пульта контрастные (в белом они почти нечитаемые, так как выполнены серебристым по белому). Подписи к кнопкам мелковаты. Кнопки мембранные, их поверхность немного выпуклая. В целом этот крохотный пульт особым удобством в работе не отличается. Главное его преимущество в том, что он радиочастотный.
Комплектация хорошая — виртуальная стена, щеточка и скребок для чистки, запасные расходные материалы и части.

Есть и напечатанная инструкция на русском языке. Упакован пылесос в не очень большую коробку с пластиковой ручкой и отсеками, сформированными из экологически безопасного картона.


Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с сайта компании-производителя и внимательно его изучить.
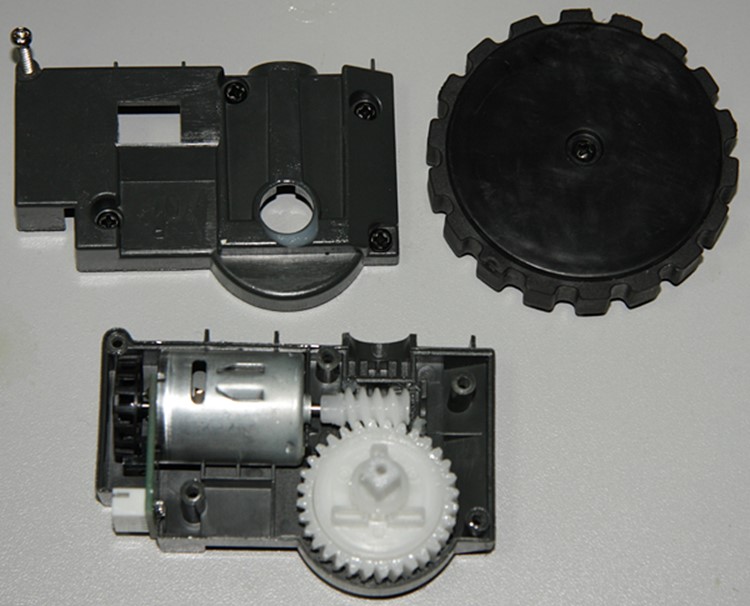
Оси ведущих колес расположены примерно на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте почти без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Наши измерения показали, что ширина робота равна 332 мм, длина — те же 332 мм, высота до самой верхней точки — 81 мм, а масса — 3,0 кг. Диаметр ведущих колес относительно большой (69 мм), но вертикальное перемещение невелико — порядка 8 мм, поэтому робот отличается средней проходимостью — на толстые ковры забирается, но пороги не преодолевает, и что важнее, не пытается, а значит и не застревает на них. Подруливающий ролик датчиком вращения не оснащен. Ведущие колеса вращаются с помощью червячной передачи, поэтому руками их провернуть невозможно, это несколько затрудняет высвобождение робота из-под предметов мебели с низким просветом. На моторах ведущих колес есть оптические датчики вращения.
При уборке передние боковые щетки с щетинками в четырех пучках подгребают мусор к центру. У этих щеток есть упругие поводки, и щетина у них не очень длинная, поэтому они не должны быстро разлохмачиваться или ломаться. Основных щеток две, они одинаковые и расположены V-образно. Их задача состоит в том, чтобы забрасывать крупный мусор в первый отсек пылесборника. Попутно они вычесывают мелкий и легкий мусор из труднодоступных мест, что повышает эффективность следующего этапа, на котором мусор засасывается через щель между двумя резиновыми скребками, перемещается во второй отсек пылесборника, где задерживается сменным воздушным фильтром. Можно считать, что данное устройство является пылесосом в классическом смысле, так как оно какую-то часть пыли засасывает непосредственно с очищаемой поверхности. На финишном этапе убираемая поверхность дезинфицируется (хотя бы в какой-то степени) с помощью УФ-лампы (если она включена). Пылесборник выполнен из непрозрачного пластика, поэтому оценить его наполнение можно только после извлечения. Отсоединять пылесборник от пылесоса относительно удобно и после некоторой тренировки это можно делать одной рукой, не сдвигая припаркованный на базе пылесос.

Пылесборник раскрывается веером и даже отсоединяется от блока с вентилятором.
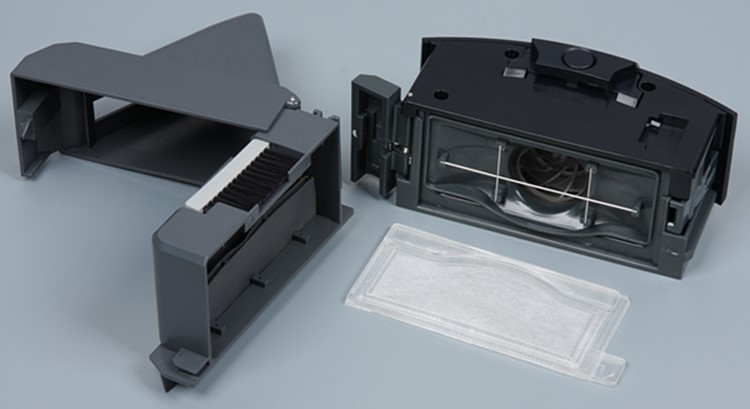
Это облегчает чистку пылесборника (часть без вентилятора, как и воздушный фильтр можно мыть), но требует и некоторой аккуратности, так как случайно раскрывшийся пылесборник может раскидать мусор в самом неожиданном месте. На пылесборнике закреплена небольшая щеточка, с помощью которой его можно чистить, впрочем, удобнее всего опустошать пылесборник и чистить воздушный фильтр с помощью обычного пылесоса с установленной щелевой насадкой. Делать это лучше почаще, так как большим объемом пылесборник не отличается, сила всасывания относительно большая, а площадь фильтрующего элемента невелика, и он быстро забивается пылью, что снижает эффективность работы этого робота. Отсек, в котором находятся основные щетки, закреплен на упругом подвесе, поэтому с небольшим ходом он следует рельефу пола. Для очистки щетки вынимаются из отсека. Волокна, волосы, нитки и т. д. наматываются на эти щетки в умеренной степени.
Воздушный фильтр пылесборника многоразовый, но не вечный, поэтому является расходным материалом, который доступен в продаже, так же как и боковые щеточки. Доступны и другие узлы, в частности, аккумуляторная батарея.
Заменить батарею и другие части может сам пользователь, вооружившись только крестовой отверткой среднего размера. При этом снять боковые щеточки, вытащить батарею и отсоединить блок с основными щетками можно вообще без инструментов. Дальнейшая разборка также относительно простая. Например, чтобы снять колесо с приводом достаточно отвернуть один саморез.

Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Данный пылесос имеет два основных режима уборки:
- Уборка всей доступной площади в течение заданного времени
- Ручное управление движением с помощью пульта ДУ
В ручном режиме с пульта доступны команды поворот вправо-влево и движение вперед-назад. Движется робот только при удержании кнопки нажатой, а убирает только при движении вперед (при столкновении робот сам меняет направление — начинает двигаться назад). В целом из-за такого алгоритма управления и из-за неудобного пульта в ручном режиме не очень удобно как убирать с помощью робота, так и перемещать его в место начала уборки — проще перенести.
После начала уборки доступны три модификатора: включение движения до физического контакта с препятствием (по умолчанию робот, ориентируясь на показания ультразвуковых датчиков, до препятствия старается не дотрагиваться); включение УФ-лампы; выключение всасывающего вентилятора (режим с пониженным шумом). Также после запуска на уборку можно установить время уборки, действующее и при уборке по расписанию. Установленное время уборки запоминается, но режим с физическим контактом нужно включать вручную при каждой уборке, что не очень хорошо, так как качество уборки в «бесконтактном» режиме хуже (см. ниже).
Есть режим запуска уборки по расписанию — можно указать день/дни недели и время, когда нужно начинать уборку. Установка времени и задание расписания — процессы, не вызывающие особых затруднений, единственная претензия — это плохая различимость обозначений на кнопках базы, с помощью которых все это осуществляется.
Может быть полезен еще один режим автоматического запуска, в котором робот начинает уборку (однократно, заданное время) после полного заряда аккумулятора. Включается этот режим коротким нажатием на кнопку Start на базе.
О своем состоянии пылесос информирует с помощью светодиодных индикаторов и звуковых сигналов (писка). Из неочевидных особенностей отметим тот факт, что когда пылесос находится на базе, то кнопкой на нем нельзя запустить уборку — только с пульта или удерживая кнопку Start на базе.
Тестирование
Ниже представлены результаты тестирования по нашей методике:
| Режим | Время уборки*, мин:сек | Доля убранного мусора, %% |
| Фиксированный интервал, первые 10 мин | 10:00 | 68,0 |
| Фиксированный интервал, вторые 10 мин | 10:00 | 90,0 (суммарный) |
| Фиксированный интервал, третьи 10 мин | 10:00 | 94,8 (суммарный) |
| Далее до разряда АКБ | 10:00 | 99,0 (суммарный) |
| Фиксированный интервал, первые 10 мин | 10:00 | 66,2 |
| Фиксированный интервал, вторые 10 мин | 10:00 | 87,6 (суммарный) |
| Фиксированный интервал, третьи 10 мин | 10:00 | 92,2 (суммарный) |
| Далее до разряда АКБ | 10:00 | 98,1 (суммарный) |
| Фиксированный интервал, первые 10 мин | 10:00 | 62,4 |
| Фиксированный интервал, вторые 10 мин | 10:00 | 82,5 (суммарный) |
| Фиксированный интервал, третьи 10 мин | 10:00 | 92,4 (суммарный) |
| Далее до разряда АКБ | 10:00 | 97,5 (суммарный) |
| Фиксированный интервал, первые 10 мин, всасывание отключено | 10:00 | 58,2 |
| Фиксированный интервал, вторые 10 мин, всасывание отключено | 10:00 | 82,6 (суммарный) |
| Фиксированный интервал, третьи 10 мин, всасывание отключено | 10:00 | 92,1 (суммарный) |
| Фиксированный интервал, первые 10 мин, без столкновений | 10:00 | 69,2 |
| Фиксированный интервал, вторые 10 мин, без столкновений | 10:00 | 83,1 (суммарный) |
| Фиксированный интервал, третьи 10 мин, без столкновений | 10:00 | 90,1 (суммарный) |
Судя по всему, во время уборки робот перебирает несколько вариантов движения, выбираемых в зависимости от текущего состояния, какой-то предыстории и/или просто случайным образом. Как минимум эти варианты включают в себя движение от препятствия до препятствия с последующей сменой направления, движение по разворачивающейся спирали и по разворачивающейся спирали в виде полигона, а также движение вдоль/вокруг препятствия.
Независимо от варианта движения робот всегда убирает — вращает боковыми и основными щетками и прогоняет воздух вентилятором. Однако при движении к базе после окончания уборки по истечении заданного времени, или при разряде аккумулятора, или по команде пользователя вентилятор и, возможно, основные щетки выключаются, что увеличивает шансы попадания пылесоса на базовую станцию. Узкий загончик (шириной на 5 см шире корпуса робота) не представлял для пылесоса особо сложной задачи — он часто в него заезжал, а, заехав, проводил в нем не очень много времени. Датчиков глобальной ориентации у робота нет, поэтому он не строит карту, не отслеживает убранные/неубранные участки и не знает своего текущего положения относительно базовой станции, стен и других препятствий. Заметим, что используемый модельный мусор продемонстрировал недостатки пылесборника: из-за небольшого объема первого отсека он быстро переполнялся и, рис, видимо, уже просто вываливался обратно.

Тем не менее, за 20-30 минут (с опустошением пылесборника через 10 минут) достигалось высокое качество уборки, в том числе в углах, около базы, вокруг препятствий и вдоль стен. Через 10 минут:
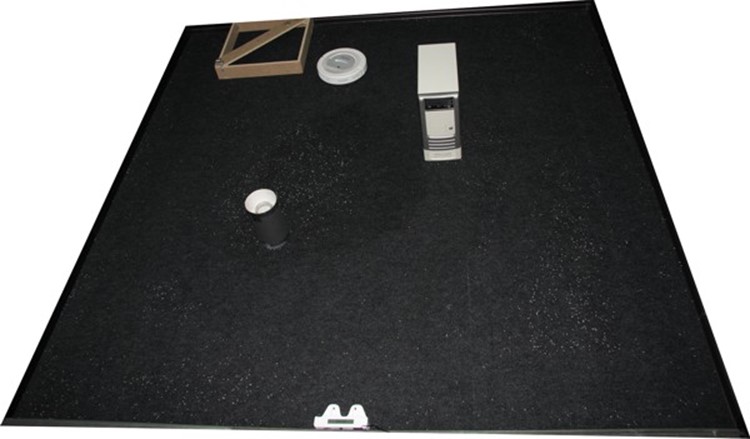
Видно, что робот по некоторым местам просто не проехал. Через 20 минут:

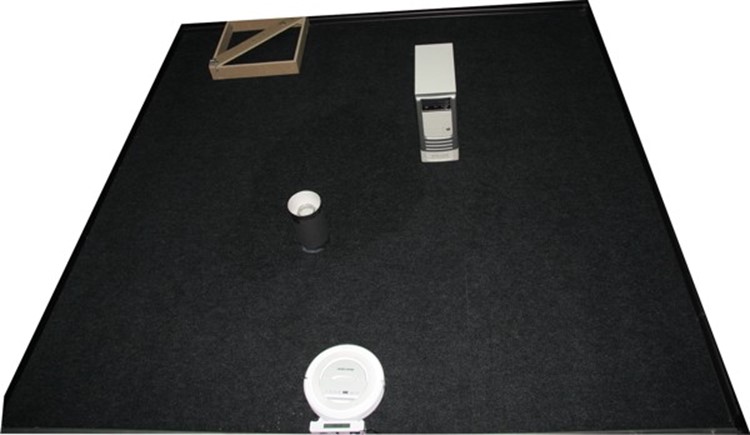
Незатронутых участков стало гораздо меньше. Через 30 минут:

Результат снова улучшился. И через примерно 2 часа после начала уборки:
Процент уборки в нашем тесте стал очень высоким — цифры приведены в таблице выше. Если дать роботу достаточно времени (или запускать почаще), то он оставит совсем немного мусора, в основном в трудных местах — в загончике:
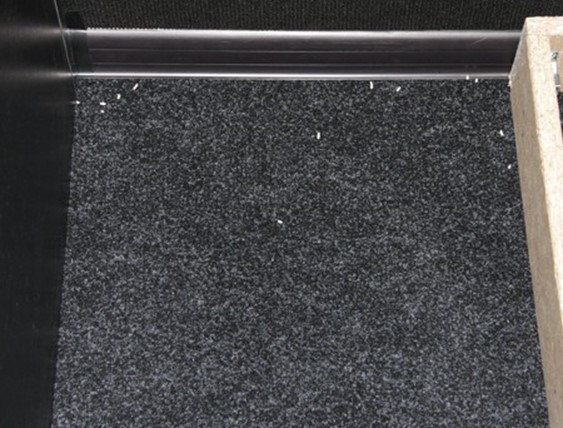
В углах, куда не дотягиваются даже боковые щеточки:

И, возможно, около базы, которую он старается объезжать:

Отметим, что очень темный пол недостаточно отражает сигнал датчиков отрыва, поэтому на нашем черном ковролине робот определял отсутствие пола и отказывался убирать до тех пор, пока мы не заклеили окошки датчиков на днище белой изоляционной лентой. С базовой станцией робот обращается довольно аккуратно — он, бывает, слегка ее толкает и сдвигает, но не настолько, чтобы потом на нее не заехать самостоятельно.
В бесконтактном режиме (по умолчанию включен) робот до препятствий не доезжает, что предохраняет мебель от царапин. В этом режиме качество уборки, в общем-то, остается высоким (см. данные в таблице в строках с указанием «без столкновений»), но вдоль стен и в тесных местах мусора остается все-таки больше. К примеру, так выглядит тестовое поле после 30 минут уборки в бесконтактном режиме:

Можно сравнить с такой же картинкой приведенной выше. Заметим, что в режиме со столкновениями ультразвуковые датчики все равно используются для обнаружения препятствий, робот перед ними замедляется и касается очень мягко, так что вряд ли даже в «контактном» режиме на мебели будут оставаться следы.
Отключение всасывания значительно снижает шум, но, разумеется, стоит ожидать, что в этом режиме пылесос легкого мусора будет собирать меньше. В нашем случае (собираем рис) отключение всасывания несильно отразилось на качестве уборки (см. таблицу выше, строки с указанием «всасывание отключено»). Связано это с тем, что в пропорции примерно 5:1 рис собирается преимущественно основными щетками, а не засасывается с потоком воздуха.
На видео ниже продемонстрированы три режима уборки. Сначала режим без столкновений (до 1:29), потом со столкновениями (до 2:44), затем с отключенным вентилятором:
Дополнительные тесты на дому показали, что этот пылесос не очень дружит с легкими и тонкими ковриками и с толстыми коврами с длинной бахромой по краю. Уголки первых и бахрому вторых он наматывает на основные щетки и в итоге прекращает работу.
Как такового режима локальной очистки нет, но можно запустить робота на уборку, а затем кнопкой Modeна пульте выбрать спиралевидный режим движения. Что мы после второй попытки и сделали.
В этом случае робот убирает по разворачивающейся и затем сворачивающейся спирали диаметром примерно 160 см (без учета смещения), и делает это в течение всего заданного времени или пока пользователь не переключит робота на другой режим.
Тестирование виртуальной стены показало ее работоспособность.

Длина преграды составляет как минимум два метра. Виртуальную стену нужно сначала включить вручную, передвинув механический переключатель на задней стенке. В дальнейшем она будет «просыпаться», когда робот начнет уборку, и «засыпать» после завершения уборки. Еще раз отметим, что в виртуальной стене изначально установлены аккумуляторы, и подзаряжать их можно, подключив виртуальную стену к базе.

Это очень удобно. Всего в пылесос можно прописать до трех виртуальных стен, один пульт ДУ и две базы. Процедура «прописки» неочевидная и требует изучения руководства, но выполнять ее нужно только для новых аксессуаров, комплектные уже «знакомы» пылесосу.
Уровень шума мы измеряли в двух режимах:
| Режим | Уровень шума, дБА |
| Обычный | 60,6 |
| Всасывание отключено | 50 |
Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. Робот можно считать не очень громким, а в режиме без всасывания — тихим, в этом режиме его можно запускать в ночное время или, например, когда хочется без особых помех посмотреть фильм.
При начале зарядки пылесоса на базе потребляемая от электросети мощность составляет максимум 24 Вт. На полный заряд батареи уходит примерно 3 часа 40 минут. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 1,6 Вт. Если пылесос убрать с базы, то потребление упадет до 1,0 Вт — столько потребляет сама база, включенная в сеть.
Выводы
Оставив в стороне неподвластное нам определение эффективности собственно V-образных щеток, подведем общий итог. Робот-пылесос Clever&Clean V-Series 001 убирает хорошо. Впрочем, не быстро, и что тому виной, алгоритм движения или щеточный/всасывающий узел, не очень понятно, однако итоговый процент уборки получился высоким. То есть если дать роботу время, то он уберет почти везде и почти все, что в принципе может. Рис с ковролина он убрать может, и, судя по неплохой силе всасывания и количеству легкого «постороннего» мусора, оседавшего в тестах на воздушном фильтре, этот робот неплохо справляется и с «легким» мусором. Бесконтактные ультразвуковые датчики, хорошо определяющие предметы с твердой поверхностью (и, в отличие от ИК-датчиков, даже черного цвета) в режиме по умолчанию предотвращают столкновение робота с предметами мебели или в режиме движения до контакта значительно смягчают прикосновение робота к препятствиям, что в обоих случаях снижает вероятность появления царапин на мебели. Дополнительно функциональность робота расширяют уборка по расписанию, поддержка виртуальных стен, радиочастотный пульт ДУ и УФ-лампа.
Достоинства:
- Высокое качество уборки
- Бесконтактный режим уборки
- Хорошая сила всасывания
- Две боковые щетки с упругими поводками
- Модульная конструкция пылесборника
- Возможность уборки в заданное время в заданные дни недели
- Ограничение движения с помощью виртуальной стены
- Виртуальные стены можно заряжать от базы
- Режим с низким уровнем шума
- Дезинфицирующая УФ-лампа
- Радиочастотный пульт ДУ
Недостатки:
- Небольшой объем пылесборника
Источник: ixbt.com





")








