
Робот-пылесос iRobot Roomba 980
То, чего многие фанаты iRobot ждали уже очень давно, наконец воплотилось в новом роботе iRobot Roomba 980: теперь он умеет ориентироваться и в нем используется литий-ионная батарея. Да здравствует мощь и интеллект!
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса, один поворотный ролик, один фиксированный ролик |
| Способ сбора мусора | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | AeroForce, одно отделение для мусора, встроенный вентилятор (мотор 3-го поколения), HEPA-фильтр |
| Основная щетка | Два безворсовых валика-скребка |
| Боковые щетки | Одна |
| Дополнительно | Нет |
| Режимы очистки | Обычный, локальный, уборка по расписанию. Модификаторы: авто/повышенная/пониженная мощность, уборка за два прохода, обход вдоль стен и препятствий |
| Эффективность очистки | Нет данных |
| Уровень шума | Нет данных |
| Датчики препятствий | Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | Нижняя видеокамера, потолочная видеокамера, ИК-датчики поиска базы и определения виртуальных стен, 3-осевые акселерометр и гироскоп |
| Управление на корпусе | Механические кнопки |
| Дистанционное управление | По Wi-Fi через мобильное приложение iRobot Home |
| Оповещение | Светодиодная индикация, звуковые сигналы и голосовое оповещение об ошибках, через приложение iRobot Home |
| Время автономной работы | До 2 часов |
| Время зарядки | Нет данных |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Аккумулятор | Литий-ионная батарея, 14,4 В, 48 Вт·ч, 3300 мА·ч |
| Потребляемая мощность | Нет данных |
| Масса | 3,94 кг |
| Размеры (диаметр×высота) | 35×9 см |
| Особенности |
|
| Комплект поставки* |
*Комплект поставки лучше уточнять перед покупкой. |
| Ссылка на сайт производителя | irobot.com и irobot.ru |
| Средняя цена по данным Яндекс.Маркет | 53800 руб. |
Внешний вид
Внешне робот очень похож на роботов 800-ой серии и имеет с ними много взаимозаменяемых узлов и элементов конструкции. Однако есть и существенные отличия.

Пылесос в плане имеет практически идеально круглую форму.
Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.



Корпус пластиковый, в основном черный, с матовой поверхностью и без покрытия. Периметр верхней панели, верхняя часть бампера и часть пылесборника имеют окантовку из пластика с темно-серым серебристым покрытием. Верхняя панель, по всей видимости, выполнена из прозрачного пластика, относительно устойчивого к повреждениям. Изнутри на панель нанесен темный рисунок или просто черное покрытие и только окошко над верхней камерой оставлено прозрачным.

Ближе к передней части на верхней панели находятся три механические кнопки — большая круглая кнопка из твердого пластика с серебристым покрытием и по бокам две поменьше из упругого пластика. Ободок центральной кнопки, значок и надпись на ней подсвечиваются зеленым, когда робот находится в активном состоянии. Значки на малых кнопках подсвечиваются белым. Перед кнопками сквозь панель подсвечиваются значки-индикаторы состояния. Еще ближе к переднему краю есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить. Нижняя часть бампера окантована резиновой «юбочкой», предохраняющей мебель от царапин. Верхняя половина бампера прикрыта вставкой из тонированного пластика черного с виду, но прозрачного для ИК-излучения (за ним спрятаны ИК-датчики препятствий и парковки на базу). Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться.

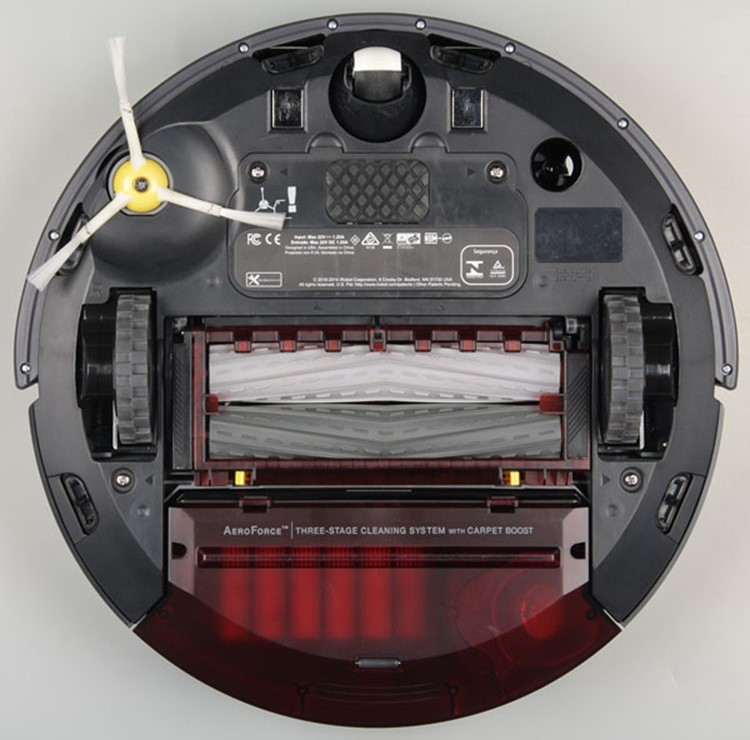
Перевернув пылесос вверх днищем, в передней части (сверху на фотографии) мы видим две контактные площадки, ролик на вращающейся платформе, боковую щетку, крышку отсека АКБ, справа от нее гнездо нижней камеры, далее вниз — два ведущих колеса на подпружиненных рычагах, отсек с основными валиками-щетками и днище отсоединяемого пылесборника. По периметру днища робота ближе к краю расположены шесть ИК-датчиков перепада высоты.
База, на которой пылесос подзаряжается, в точности такая же, что и база пылесосов 800-й серий.

Она имеет встроенный блок питания и отсоединяемый кабель питания. Это хорошо — нет внешнего БП и дополнительных проводов, которые постоянно мешались бы, и база относительно тяжелая, что повышает ее устойчивость. Штатный кабель питания относительно короткий — 1 м, но, при необходимости, найти ему замену труда не составит, так как разъем на базе представляет собой стандартную «восьмерку».

Снизу на основание базы приклеены небольшая резиновая площадка и составная площадка побольше из поролона и какого-то другого пористого материала в шашечку.

В итоге база хорошо цепляется за пол с самой разнообразной поверхностью, но в случае чего закрепить базу на полу можно с помощью, например, двусторонней клейкой ленты. Отметим, что база полностью взаимозаменяема с комплектом из базы и БП от предыдущих моделей Roomba.
Пылесос комплектуется двумя виртуальными стенами новой конструкции, к которым приложены щелочные (!) элементы питания типа AA известного производителя (один комплект мы уже установили в стену). Кроме того, в коробке мы обнаружили один запасной фильтрующий элемент, а судя по описанию на сайте, в стандартный комплект входит еще и одна запасная боковая щеточка.

У нас на тестировании был предпродажный уже слегка использованный образец с неполной комплектацией (как минимум не было боковой щеточки и никакой документации) и в простой неоформленной коробке.
Функционирование
О функциях пылесоса обязательно нужно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с сайта (русская версия была доступна на оригинальном сайте компании-производителя), и внимательно его изучить.
Тем, кто не читает руководства по эксплуатации, настоятельно рекомендуем прочитать хотя бы два нижеследующих абзаца:
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Ни одну из частей пылесоса недопустимо мыть под водой — ни щетки, ни фильтр, ни сам пылесборник. Даже одна капля, неудачно просочившаяся внутрь робота, может привести к выходу из строя основной платы.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (71 мм), а ход шарниров в точке центров колес достигает почти 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Потенциально робот способен преодолевать препятствия высотой где-то до 19 мм — примерно такое расстояние от пола до нижней точки бампера пылесоса, что согласуется с проходимостью, то есть робот не будет пытаться залезть на то, на чем с большой вероятностью застрянет.
Передний подруливающий ролик служит третьей опорой, однако, несмотря на привычную черно-белую раскраску, он уже не является частью датчика перемещения (под ним нет фотодатчика). Эти функции возложены на нижнюю камеру. По всей видимости она оснащена ИК-подсветкой и позволяет отслеживать перемещение робота по полу по изменению между снимками. Как в случае мыши с оптическим датчиком, разве что, возможно, кроме перемещения отслеживается и поворот. Видимо, примерно по такому же принципу работает и направленная вверх камера на верхней панели робота, только отслеживаются изменения на снимках потолка и окружающей обстановки. У робота есть и другие датчики, помогающие в ориентации в пространстве, в частности 3-осевые акселерометр и гироскоп.
При уборке передняя боковая щеточка подгребает мусор к центру. Правильной работе этой щеточки способствует наклон ее оси внутрь, благодаря чему прижим сильнее на фазе движения сбоку-вперед. Также отметим конструкцию боковой щеточки — гибкие упругие поводки (для прочности прошитые на концах) заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает эффективно и не теряет свою форму. (Одна такая щеточка даже при активном использовании робота может прослужить несколько лет, если, конечно, в зоне работы робота нет предметов, представляющих для щеточки повышенную опасность.) Саморез, фиксирующий эту щеточку теперь не выпадает из центрального отверстия (его сложнее потерять) и дополнительно имеет широкий прямой паз, поэтому снять и установить щеточку можно без крестовой отвертки, достаточно монеты (текущий рубль подходит). При этом прямая и обратная совместимость с боковыми щетками от предыдущих моделей сохранилась.
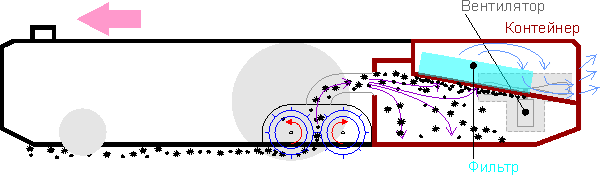
Основных щеток две, они вращаются навстречу друг другу. На самом деле это не совсем щетки, так как они лишены ворса, но мы будем по привычке называть их щетками (в русском руководстве используется сложное название валики-скребки, в английском — extractor). Две щетки не взаимозаменяемые, но конструкцию имеют одинаковую: внешний упругий цилиндр с ребрами (не резиновый, а скорее из силикона), закрепленный на оси из твердого пластика. С одной стороны эта ось продолжена шпилькой из нержавеющей стали, на которую надета желтая пластиковая втулка с бронзовым подшипником скольжения.

С другой — ось заканчивается шестигранником или квадратом, что соответствует ответной части в механизме вращения щеток. Дополнительную упругость внешней оболочке щеток придает находящийся внутри цилиндров наполнитель из поролона. Напомним, что основным преимуществом таких валиков без щетины является то, что они очень мало наматывают на себя волосы, шерсть, нитки и т. д., а все немногое намотавшееся (в основном на торцы) легко снимается при очистке без использования каких-либо инструментов. Владельцы домашних животных с шерстью должны особенно оценить это. Вращающиеся щетки сначала подхватывают мусор с пола, затем мусор воздушным потоком перемещается в емкость пылесборника. Тяжелый мусор остается на дне емкости, а мелкий и легкий задерживается воздушным фильтром. Примерная схема, представленная ниже, демонстрирует основной принцип сбора мусора:
Отметим, что такая конструкция не исключает прямой заброс тяжелых частиц в пылесборник, но делает его маловероятным, в отличие от предыдущего варианта (в сериях до 800-ой) с большой щеткой с длинным ворсом и кромкой емкости для мусора непосредственно у щетки. Стыки узлов и деталей на всем пути воздуха от щеток до выхлопной решетки сзади имеют упругие уплотнения, а щеточный узел соединен с корпусом упругим и герметичным воздушным рукавом, что уменьшает паразитный подсос воздуха. Также производитель обещает увеличенную в несколько раз, в сравнении с предыдущей линейкой роботов, мощность вентилятора. Наши замеры это подтвердили, так при питании от 12 В мотор вентилятора в 800-й серии потребляет порядка 460 мА, тогда как новый мотор в 980 — 2 А, что 4 раза с хвостиком больше. Возможно из-за более мощного и чуть более тяжелого вентилятора на днище пылесборника появился небольшой ролик. Новый пылесбоник можно установить в роботы 800-ой серии, и вентилятор там работает, но с учетом гораздо большего тока лучше так не делать.
Днище пылесборника выполнено из прозрачного тонированного красным пластика, но прозрачной оставлена только узкая полоска, остальная поверхность заматирована, поэтому визуально, просто осмотрев робота, о степени заполнения пылесборника судить сложно.

Очищать пылесборник относительно просто: откидывается шторка, и пыль вытряхивается. Затем вынимается и очищается HEPA-фильтр.

Заметим, что в этом фильтре сначала идет крупноячеистая сеточка, которая не допускает крупную пыль до складчатого мелкопористого фильтра. Это облегчает чистку фильтрующего элемента и повышает его долговечность. Новый мотор-вентилятор больше по габаритам и размещен в отсеке под углом. Перед входным отверстием вентилятора теперь установлена откидывающаяся шторка, видимо, уменьшающая вероятность попадания мусора в вентилятор, когда пылесборник вытряхивается с вынутым фильтром. Отсоединять пылесборник относительно удобно, после некоторой тренировки удается сделать это одной рукой, не сдвигая припаркованный на базе пылесос.
Отсек, в котором находятся основные щетки, закреплен на рычажках, поэтому с ходом примерно в 9 мм он следует рельефу пола, что увеличивает эффективность очистки. Проволочных направляющих-ограничителей нет, предотвращение наматывания уголков ковриков возложено на систему управления и контроля. На фотографии ниже обозначены элементы системы определения степени загрязнения Dirt Detect 2, перешедшей по наследству от предыдущих моделей.

В состав Dirt Detect 2 входят акустический (по центру) и оптический датчики. Первый датчик по шуму ударяющихся о мембрану микрофона частиц определяет степень загрязнения в текущем месте уборки. Второй датчик, состоящий из источника ИК-излучения и фотоприемника, просвечивает пылесборник сразу за шторкой. Соответствующее изменение степени поглощения в ИК-диапазоне позволяет также отслеживать содержание пыли в потоке воздуха, и дополнительно, указывает на переполнение пылесборника.
Все, что требует частого внимания со стороны пользователя, обозначено желтым цветом. Подробно, как ухаживать за роботом, описано в руководстве пользователя (на сайте есть и видео-инструкция), поэтому не будем повторяться.
Аккумуляторная батарея теперь литиевая и имеет чуть большую заявленную емкость (было 3000 мА·ч, стало 3300 мА·ч.)
Поверхностные тесты показали, что эта новая и старые батареи совместимы с Roomba 980 и предыдущими моделями. Так старенький робот Roomba 531 без проблем работал от новой литиевой батареи, и заряжал ее на базовой станции. Отметим, что Roomba 531 от этой батареи непрерывно убирал 3 ч 25 мин, вместо обычных 2 ч, а встроенная диагностика робота показала емкость батареи в 3700 мА·ч. И наоборот, новый Roomba 980 работал со старой Ni-MH. Однако производитель настоятельно рекомендует использовать с Roomba 980 только новую литиевую батарею. Какова официальная позиция относительно того, можно ли со старыми роботами использовать новую литиевую батарею, нам неизвестно.
Повышенный «интеллект» нового робота проявляется не только в том, что теперь он умеет ориентироваться в пространстве, но и в поддержке удаленного управления с помощью мобильного (доступны версии для iOS и Android) приложения iRobot Home.
В принципе, использовать робота, можно без приложения и не подключая его к Сети, но со смартфона или планшета предоставляется доступ к недоступным иначе настройкам робота, именно с помощью iRobot Home можно задать расписание работы робота на неделю, приложение поможет понять, в каком состоянии сейчас робот, покажет вводную видео-инструкцию и текстовое подробное руководство, даст ответы на часто задаваемые вопросы и даже подскажет, что пора заменить, и поможет купить запасные части, и т. д., и т. п. И все это на понятном русском языке. Обязательно нужно ставить!

И еще, обновления для робота теперь загружаются по Wi-Fi и устанавливаются, видимо, в принудительном порядке. После установки и запуска приложение подскажет, как подключить робота к Сети. Отметим, что поддерживается только Wi-Fi в простом виде (без VPN и т. д.), и только диапазон 2,4 ГГц (каналы 1—13 для моделей не для Северной Америки). Некоторые маршрутизаторы могут потребовать дополнительных настроек или оказаться вовсе несовместимыми и т. д. — см. подробности на сайте, однако в большинстве случаев все должно получиться без особых усилий. Робот запоминает только одну сеть, поэтому не может автоматически переключаться при переходах между сетями, но настройки сети сохраняются даже после изъятия батареи. Связь приложения с роботом осуществляется, по всей видимости, через облачный сервер. С одной стороны это хорошо, так как приложение имеет доступ к роботу из любой точки, где есть интернет, с другой — плохо, так как при наличии проблем на стороне сервера или без доступа к Сети управлять роботом из приложения невозможно, даже если робот и планшет/смартфон находятся в одной сети.
iRobot Roomba 980 имеет два основных режима уборки:
1. Автоматическая уборка всей доступной площади. По окончании уборки пылесос возвращается на базу.
2. Режим локальной очистки (режим Spot) — интенсивная очистка определенного участка. В нужное место пылесос переносится пользователем.
При использовании мобильного приложения становятся доступными 4 опции:
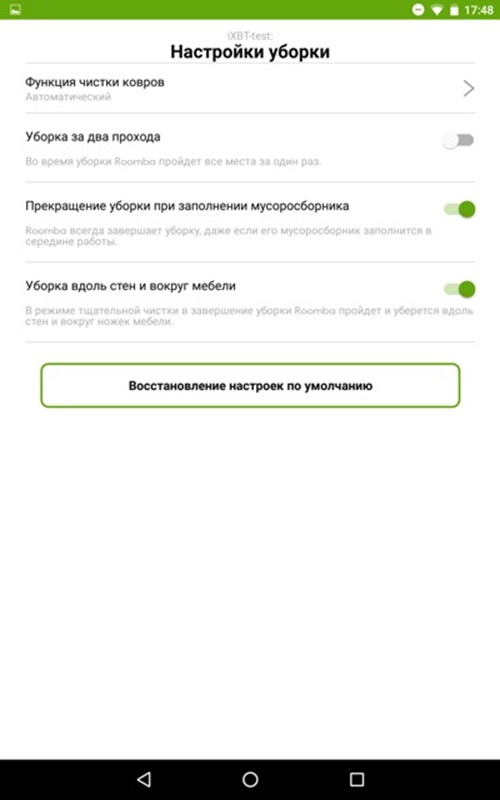
Управление вентилятором — повышать мощность на коврах (по умолчанию), включать вентилятор на высокую мощность на все время уборки или использовать только низкую мощность. Выполнять уборку за один проход (по умолчанию) или за два. Продолжать работу при заполненном пылесборнике (по умолчанию) или завершать уборку при его переполнении. Убирать в конце вдоль стен и мебели (по умолчанию) или не делать этого.
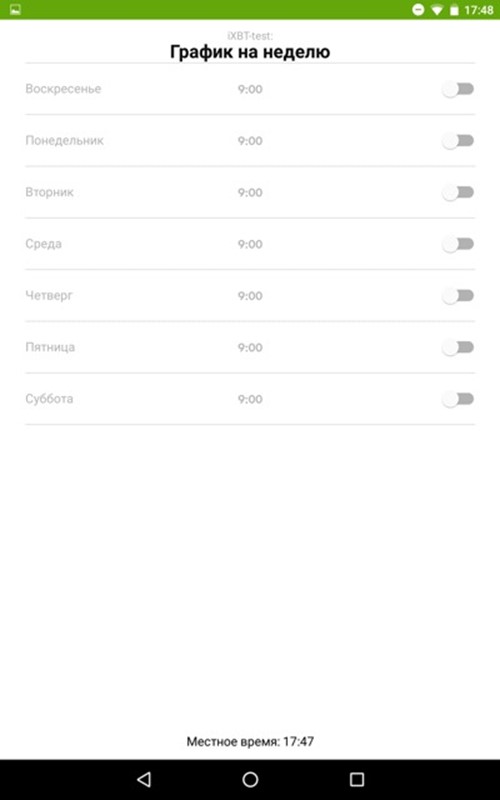
Режима с ручным управлением не предусмотрено и в руководстве он не упоминается. Впрочем, эксперименты показали, что робот реагирует на команды движения, поданные ИК-пультом от предыдущих моделей. Также с пульта можно запустить и остановить уборку, но по какой-то неведомой причине, разработчики заблокировали команды локальной уборки и возврата на базу. Запуск автоматической уборки можно назначить на определенное время в любой день недели, при этом время запуска устанавливается (или не устанавливается) свое на каждый из семи дней. Если расписание создано, то в заданное время пылесос съедет с базы, проведет уборку и вернется на базу. Напомним, что редактировать расписание теперь можно только из мобильного приложения
Пространственно организовать уборку поможет виртуальная стена — специальное устройство, входящее в комплект поставки (в коробке две штуки, но при необходимости, их можно докупить дополнительно).

Это устройство работает от двух элементов питания типа АА. Стена может работать в двух режимах. В первом в направлении (указано полоской сверху) от виртуальной стены создается невидимая преграда (длиной 3 м по заверениям производителя), которую пылесос не пересекает. С помощью такой преграды можно отгородить места, где выполнять уборку нежелательно. Во втором стена работает в режиме кругового ограничителя, не подпуская к себе робота ближе определенного расстояния (заявляется о радиусе в 60 см). Фактически во втором случае режим направленной преграды просто не активируется, работает только круговой излучатель на верхушке башенки.

Типичный пример использования кругового ограничителя — это создание защитного барьера вокруг мисок с кормом и водой для домашних четвероногих питомцев. Включается и выключается устройство переключателем сбоку, им же выбирается режим работы. В обычной ситуации выключать устройство необязательно (видимо, оно активируется само при приближении робота), при этом производитель утверждает, что в таком случае от одного комплекта источников питания стена может работать 8-10 месяцев. И только в случае планируемого длительного неиспользования для продления срока работы элементов питания стену желательно выключать
О своем состоянии пылесос информирует с помощью светодиодных индикаторов, кроме того, о переходах между некоторыми состояниями пылесос сообщает, проигрывая короткую мелодию, а об ошибках он информирует, проговаривая соответствующую фразу на выбранном пользователем языке (русский язык, видимо, доступен). Отключить звуковое/голосовое оповещение нельзя. Ну и, конечно, не забываем о мобильном приложении — с его помощью находясь в любой точке мира (главное, чтобы Сеть была) можно узнать, что робот делает в данный момент. Ну и прочее — сколько всего убрал (в квадратных футах), сколько раз запускался, текущий уровень износа и т. д. Жалко что картинку с камеры нельзя подсмотреть, и, как заверяет производитель, нельзя в принципе.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Опция «завершать уборку обходом вдоль стен и препятствий» всегда включена. Каждый раз робот запускался после полной зарядки батареи.
| Режим | Время уборки, ММ:СС | % |
| Один проход, высокая мощность | 20:20 | 91,3 |
| Один проход, высокая мощность | 15:05 | 88,8 |
| Два прохода, высокая мощность | 29:54 | 96,1 (суммарный) |
| Два прохода, низкая мощность | 28:20 | 95,1 (суммарный) |
Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Также целенаправленно он возвращается к базовой станции по завершении уборки. Без карты такое поведение было бы невозможно осуществить.
При обнаружении загрязненного участка робот медленно прокатывается взад-вперед два раза и затем продолжает уборку в обычном режиме. По всей видимости, черный ковролин с коротким ворсом робот принимал за ковер, так как и в режиме с автоматическим изменением мощности вентилятора, и в режиме с максимальной мощностью шумел робот абсолютно одинаково на протяжении всей уборки. В узкий загончик (шириной на 5 см шире корпуса робота) пылесос обычно заезжал, пусть и не очень охотно. А в конце, как и было обещано, робот убирал вдоль стен и предметов обстановки (эта опция была включена). В режиме с двумя проходами второй раз робот меняет направление проходов на перпендикулярное, что, по идее, должно улучшать качество перекрытия поверхности пола.
Перекрытие поверхности пола является достаточно равномерным, видно, что робот больше внимания уделяет стенам и пространству вокруг базы (сказывается дополнительный обход по периметру и способ следования вдоль темных стен, которые не видны дистанционными ИК-датчиками, и около ограничительной зоны базы). В режиме с пониженной мощностью робот только в самом начале пробует вентилятор на высокой мощности, затем снижает ее и больше не повышает.
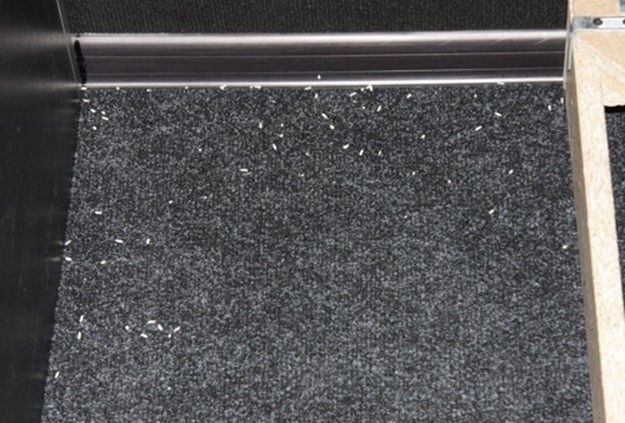
С базой робот обращается аккуратно — не было случая, чтобы пылесос сдвинул базу после начала уборки, и робот в наших тестах всегда заезжал на базу с первого раза. При этом непосредственно около базы оставалось не так уж и много мусора. Хотя в целом, качество уборки, особенно в режиме с одним проходом не впечатляет. Напомним, что iRobot Roomba 870 за 20 с небольшим минут убирал 97% тестового мусора. С точно такими же щеточками и с менее мощным вентилятором. В данном же случае после 15-20 минут уборки с одним проходом много мусора остается на площади и около стен и препятствий:

Где-то на треть или в два раза больше времени в режиме с двумя проходами ситуацию исправляют, мусора на полу остается немного:

На площади почти нет, рис остался в основном непосредственно около базы:

Немного в углах:

И в сложном тупичке:
Видимо, слишком много времени робот тратит на медленные проходы при обнаружении загрязненных участков, что в данном случае не особо повышает эффективность. Также робот отличается некоторой задумчивостью — иногда останавливается, о чем-то про себя размышляя. Вообще наш тестовый участок с черным ковролином плохо совместим с навигационной системой робота. Можно предположить, что нижняя камера плохо на нем работала, а одной верхней тоже было недостаточно из-за таких же черных стен и потолка. В итоге робот иногда терял ориентацию и проводил слишком много времени, крутясь на месте или двигаясь странным маршрутом. Так в тесте с меткой при выключенном верхнем свете робот стал двигаться почти хаотично, пришлось включить треть потолочных светильников, что уже спасло положение — на записи с меткой змейка ровная. Справедливости ради отметим, что в аналогичных тестах роботы с навигацией от других производителей на черном ковролине и в темноте ориентацию не теряли, разве что роботов Neato с их лазерным радаром черные неотражающие стены очень смущали, нужно было хоть что-то светлое для них ставить.
В режиме локальной очистки (Spot) робот убирает по разворачивающейся и затем сворачивающейся спирали, так как это демонстрирует видео ниже:
В этом режиме робот убирает в почти круге диаметром примерно 1,2 м.
Дополнительно было испытано устройство ограничения в режиме виртуальной стены. Отметим, что стены предыдущего варианта работают с новым Roomba 980, и новые стены отпугивают старых роботов, но, видимо, они автоматически не будут включаться при запуске робота. Новую элегантную и компактную стену мы установили у стены, перегородив тестовый загон поперек, и запустили робота.
Робот через какое-то время потерял ориентацию (ну не нравится ему все черное), но стена свою задачу выполнила и создала непреодолимый для робота барьер длиной как минимум в 3 м.
Где-то в радиусе 50 см от ограничителя мусор на полу остался. Работает.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом отсеке был выгорожен участок из трех помещений, обозначенных на схеме как А (28,4 м² — «прихожая»), Б(23,3 м² — «коридор») и В (18,5 м² — «комната»). База установлена в помещении А (мебель и прочее — столы, кресла, аквариум и т. д. на схеме не показаны):
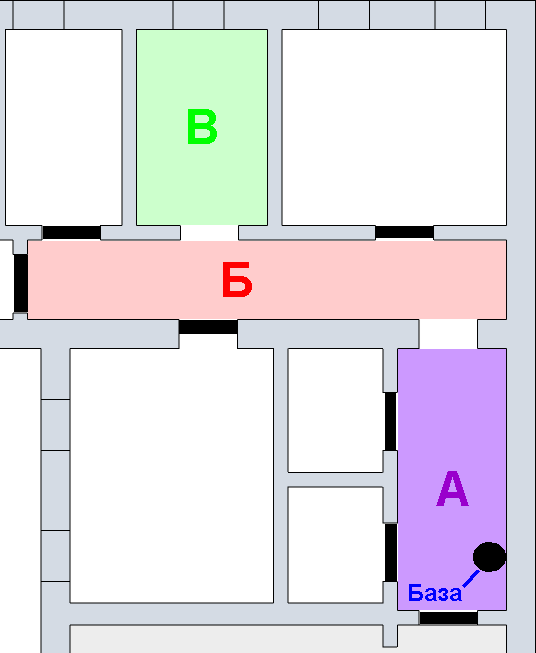
Режим работы — высокая мощность и два прохода. При запуске с базы в общей сложности робот убирал 1 час 8 минут. При этом где-то на 45-й минуте он завершил первый цикл и стал выполнять второй проход и, не закончив его, на 7-й минуте второго часа поехал на базу для подзарядки. Как только робот припарковался на базе, мы его с нее сняли, убрали базу и включили робота. Еще 13 минут робот провел в поисках базы (щетки и вентилятор работали как при уборке) и только затем остановился и решительно потребовал его зарядить. То есть запас на нахождение базы весьма приличный, учитывая то, что робот «знает», где находится база. В условиях реального помещения робот хорошо сохранял ориентацию, например, при движении из комнаты в дверной проем он промахивался где-то на 15-20 см не больше. Явных пропусков мы не обнаружили, даже если робот пропускал участок, то потом он возвращался и убирал там. Впрочем, как и все побывавшие у нас на тестировании роботы с навигацией, по крайне мере в первый раз робот не оперирует такими понятиями как комната и стены, с его точки зрения есть какая-то доступная площадь и препятствия на ней, как робот обойдет эту площадь определяется порядком обнаружения препятствий и алгоритмом уборки, на реальные комнаты робот площадь не делит. В этом плане условная навигация с помощью маяков, реализованная в предыдущих топовых моделей iRobot, имеет определенные преимущества — пользователь может в явном виде отделить комнаты, в которых робот будет последовательно выполнять уборку.
Если использовать приведенные выше данные и считать, что на один цикл уборки площади примерно в 70 м² робот тратит 45 минут, то в режиме высокой мощности за один проход робот может убрать порядка 200 м² с учетом одной подзарядки (а в явном виде нигде не сказано, сколько раз робот может подзаряжаться и самостоятельно возобновлять уборку). В режиме с низкой мощностью вентилятора (а на тестовом мусоре это не сильно снижало эффективность) время работы и максимальная площадь увеличатся, а в режиме с двумя проходами соответственно уменьшатся.
Уровень шума мы измеряли в двух режимах:
| Мощность вентилятора | Уровень шума, дБА |
| Низкая | 60 |
| Высокая | 66 |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. В режиме с низкой мощностью вентилятора робот шумит примерно как модели 800-й серии — громко, но еще терпимо. Когда же робот работает в режиме с высокой мощностью вентилятора находиться с ним в одном помещении уже очень не комфортно — шум громкий и неприятный.
На полную зарядку батареи уходит почти три часа (у нас получилось 2 часа и 55 минут), что соответствует увеличенной емкости батареи при оставшимся неизменном блоке питания. В процессе зарядки пылесоса на базе потребление от электросети равно примерно 29 Вт. Если пылесос включен, заряжен и находится на базе в состоянии готовности, то от сети потребляется порядка 4,5 Вт. Если пылесос убрать с базы, то потребление упадет до 0,5 Вт — столько потребляет сама база, включенная в сеть.
Выводы
Компания iRobot превзошла ожидания поклонников ее уборочной техники, выпустив первого в ее истории робота-пылесоса с системой продвинутой ориентации. Но на этом значимые новшества не закончились, новый Roomba 980 получил емкую литий-ионную батарею, в четыре раза более мощный вентилятор и поддержку удаленного контроля и управления с помощью мобильного приложения. В случае помещений из одной-двух комнат способность к ориентации особых преимуществ не дает, так как и предыдущие модели роботов Roomba в таких ситуациях хорошо справлялись с уборкой, но в квартире из нескольких комнат робот, понимающий, где он находится и где уже убрал, может достичь более стабильного результата, так как с гораздо большей вероятностью с первого раза уберет везде, куда только сможет попасть. На основании результатов проведенных нами тестов мы можем предположить, что программное обеспечение робота еще может быть улучшено, так как робот слегка задумчивый и в сложных ситуациях бывает, что теряет ориентацию. Это немного снижает общую эффективность, но простота автоматического обновления «по воздуху» дает надежду, что компания iRobot использует эту возможность для дальнейшего совершенствования алгоритмов ориентации и уборки. К сожалению, проследить за прогрессом мы не сможем, так как робота нас попросили вернуть. Но, возможно, с выходом значимых обновлений у нас получится повторить ряд тестов.
Достоинства:
- Хорошее качество уборки вдоль стен, вокруг препятствий и на открытой площади
- Система продвинутой ориентации
- Функциональное мобильное приложение для контроля и управления
- Легкая очистка основных щеток
- Высокая мощность всасывания
- Как минимум однократное возобновление уборки после подзарядки
- Поддержка виртуальных стен и круговых ограничителей
- Датчики переполнения пылесборника и уровня загрязнения
- HEPA-фильтр
- Бережное отношение к мебели — замедление перед препятствием и мягкая накладка на бампере
- Режим уборки по расписанию
- Хорошая комплектация — запасные фильтр и боковая щеточка, две виртуальные стены и комплект щелочных элементов питания к ним
- Компактная интегрированная база
- Голосовое оповещение
- Отличная локализация для России
Недостатки:
- Неотключаемое звуковое оповещение
- Высокий уровень шума в режиме максимальной мощности вентилятора
- Важные опции доступны только из мобильного приложения при работающем подключении к Сети
Источник: ixbt.com





")








