Умная бытовая техника делает нашу жизнь более комфортной, в частности высвобождает дополнительное время, которое можно посвятить самосовершенствованию или играм и просмотру фильмов. Без высоких технологий в такой технике никак не обойтись. Казалось бы, относительно простая задача — пропылесосить квартиру, но в Samsung Navibot Silencio SR8895 на «железном» уровне ее решают два процессора, а на программном — приложения под управлением операционной системы для Windows CE 5.0.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Емкость 0,6 л, два отделения |
| Основная щетка | Одна: ворс + скребки |
| Боковые щетки | две |
| Дополнительно | Полировочная насадка из микрофибры + скребок |
| Режимы очистки | Авто, Пятно, Максимум, Ручной, Вдоль стены, Уборка по расписанию, Ежедневная уборка |
| Эффективность очистки | 3×3 м за 10 мин |
| Уровень шума | 60 дБА |
| Датчики препятствий | Механический передний и боковой бампер, ИК-датчики столкновения и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы и определения виртуальных стен, видеокамера с углом обзора вокруг 360° и вверх на 167° |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодный дисплей и звуковые сигналы |
| Время автономной работы | до 90 мин |
| Время зарядки | 120 мин |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | NiMH, 14,4 В, 2000 мА |
| Потребляемая мощность | 50 Вт при зарядке батареи |
| Масса | 3,7 кг |
| Размеры (диаметр×высота) | 355×93 мм |
| Особенности | Возможность быстрого удаления пыли, предмоторный фильтр Mirco, выпускной фильтр HEPA 11, создание карты и выбор оптимального маршрута уборки, работа с маяками в режимах «виртуальная стена» и «виртуальная дверь» |
| Комплект поставки* |
|
| Ссылка на сайт производителя | www.samsung.com/ru/ |
Внешний вид

Пылесос имеет классическую круглую в плане форму корпуса. Края сверху и снизу скошены и немного cкруглены.

Скос снизу поможет преодолевать препятствия, но скос сверху, возможно, будет способствовать тому, что пылесос чаще будет застревать под препятствиями с небольшим просветом. Сверху корпус прикрыт панелью из прозрачного пластика, под которую помещена черно-серебристая подложка с концентрическим узором.

Тут есть один неприятный момент — каким-то образом между панелью и подложкой умудряются попадать пылинки, которые очень бросаются в глаза на темном фоне и которые практически невозможно удалить. Сверху в центре располагается контрольная панель с четырьмя сенсорными кнопками (видимо, применены ИК-датчики), четырехразрядным светодиодным семисегментным индикатором и вспомогательными значками со светодиодной подсветкой. В передней части находится круговая направленная вверх видеокамера для ориентации по потолку, в задней части — лючок для быстрого удаления пыли и кнопка фиксации пылесборника. По бокам всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом. В передней части бампера расположен невысокий выступ.

Этот выступ является самой высокой частью пылесоса и, соответственно, определяет минимальный просвет препятствия (например, дивана), под которое пылесос еще может забраться. Согласно нашим измерениям этот просвет равен 94 мм. Бампер и часть корпуса за ним имеют обрезиненную поверхность, что снижает риск повреждения предметов обстановки во время уборки. Пристыкованный сзади пылесборник продолжает окружность корпуса.

Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, две боковые щетки, два ведущих колеса на подпружиненных рычагах, желтый отсек со щеткой, красную кнопку выключения и дно пылесборника.

В дополнении к видеокамере пылесос оборудован механическими датчиками столкновения, реагирующими на перемещение бампера, ИК-датчиками приближения к препятствию (расположены за темными окошками по периметру корпуса и на бампере), ИК-датчиками перепада высоты (окошки на днище близко к краю), благодаря которым пылесос не падает со ступенек, ИК-датчиками опознавания маяков Virtualguard (спереди на бампере), которые, видимо, используются и при возврате на базу, и датчиком отрыва от пола, по сигналу которого пылесос прекращает всякую механическую активность. На коробке с пылесосом был указан и гироскопический датчик, но больше никакого подтверждения этому мы не обнаружили, поэтому наличие такого датчика остается под вопросом.
База, на которой пылесос подзаряжается, имеет встроенный блок питания, что придает ей дополнительный вес. Основание базы относительно большое и снизу на нем находятся две резиновые ножки и две резиновые фигурные площадки.

Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса.

Сзади на корпус базы справа или слева можно закрепить кармашек для пульта ДУ. Сам пульт относительно небольшой и кнопок на нем немного.

К сожалению, пульт работает по ИК-каналу, поэтому для управления пылесосом он должен находиться в пределах прямой видимости и пульт нужно направлять примерно в переднюю часть пылесоса. В общем, для этого типа техники, которая так и норовит уползти куда подальше, пульт с радиочастотным каналом управления является более предпочтительным.
Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя, и внимательно его изучить.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади. В итоге, он в принципе всегда может выбраться из того места, куда забрался. Указанная производителем скорость движения при уборке равна 0,3 м/сек. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 1,5 см при благоприятной форме перехода.
При уборке две передние щеточки подгребают мусор к центру, затем основная щетка перебрасывает его в пылесборник. Samsung SR8895 не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности пыль не засасывается. Примерная схема, представленная ниже, демонстрирует основной принцип сбора пыли:
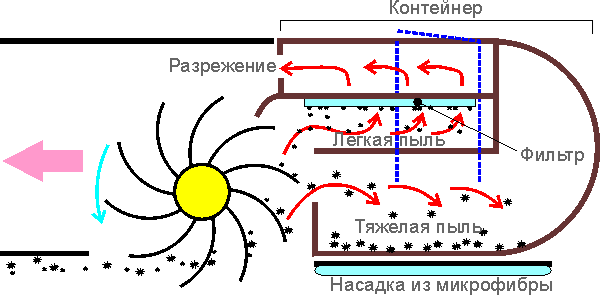
Тяжелые частицы забрасываются главной щеткой в нижний отсек пылесборника, а легкие частицы засасываются в верхний отсек пылесборника, где задерживаются фильтром. Для дополнительной очистки гладких полов на днище за основной щеткой можно закрепить специальную планку, на которую на липучке прикрепляется махровая насадка из микрофибры, начисто протирающая поверхность.

Корпус пылесборника частично выполнен из прозрачного слегка тонированного пластика, что позволяет контролировать его наполнение, по крайней мере, пока его стенки не сильно загрязнены. Быстро удалить мусор из пылесборника можно следующим образом: открыть крышечку с надписью Quick Empty и через открывшееся отверстие отсосать пыль обычным пылесосом.

Для более тщательной очистки пылесборник нужно отсоединить от корпуса пылесоса, откинуть синюю шторку и вытряхнуть накопившуюся грязь, а лучше отсосать ее обычным пылесосом.

Им же можно почистить HEPA-фильтр, который при сильном загрязнении можно и промыть водой. Дополнительно периодически по мере необходимости нужно очищать главную щетку и удалять намотавшиеся на оси боковых щеток и колес нитки/волосы. Для выполнения этих процедур можно воспользоваться прилагаемой щеточкой-скребком. Очистку главной щетки удобнее выполнять, вынув ее из отсека.

Отметим, что вращается она на двух бронзовых подшипниках скольжения. Щетка очищается без каких-либо проблем, за исключением щелей между черными торцевыми заглушками и желтым валом, куда наматываются волосы и тонкие волокна. Впрочем, с помощью плоской и крестовой отверток эти заглушки снимаются, после чего все намотавшееся легко удаляется. Насадка из микрофибры стирается и сушится обычным образом. Завершает очистку пылесоса протирка корпуса с особым вниманием к окошкам ИК-датчиков и камеры. Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
Авто — однократная уборка всей доступной площади.
Пятно — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
Максимум — уборка всей доступной площади до тех пор, пока батарея почти не разрядится.
Ручной — ручное управление движением с помощью пульта ДУ. С пульта доступны команды поворот вправо-влево и движение вперед. Движение назад недоступно, но при столкновении с препятствием пылесос автоматически сдает назад на пару сантиметров, что позволяет выбраться из сложных мест.
Также доступны опции Турбо — увеличение скорости вращения главной щетки и, видимо, увеличение мощности всасывания — и Уборка у стены, при включении этой опции пылесос подходит к препятствию на минимальное расстояние. Разрешается любое сочетание этих двух опций со всеми режимами уборки.
Автоматический запуск режима уборки обеспечивают Уборка по расписанию — однократная уборка в заданное время — и Ежедневная уборка — уборка каждый день в установленное время.
Пространственное планирование уборки обеспечивается с помощью устройств-маяков Virtualguard. В коробке с пылесосом мы обнаружили три таких устройства, сколько входит в стандартный комплект поставки нужно уточнять перед покупкой.

Маяк Virtualguard работает от двух элементов питания типа D20 («большой бочонок»). Virtualguard может работать в двух режимах — виртуальная стена и виртуальная дверь. В первом случае в направлении от маяка создается виртуальная преграда, которую пылесос не пересекает. Направление этого барьера обозначено стрелкой на корпусе маяка, а длина составляет не менее 2,5 м. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Режим виртуальная дверь используется для установления последовательности уборки: заехав в помещение/закуток, ограниченное виртуальной дверью, пылесос останется в нем, пока не уберет всю площадь этого пространства.
Тестирование
Полноценное объективное тестирование очень затруднено в виду невообразимого количества возможных сочетаний конфигурации помещения и обстановки, типов поверхности и видов мусора — пыль, песок и крупные частицы, волосы, нитки и шерсть и т. д. и т. п. Однако ограничиваться только субъективными впечатлениями тоже не очень интересно. В итоге мы разработали некоторую компромиссную методику.
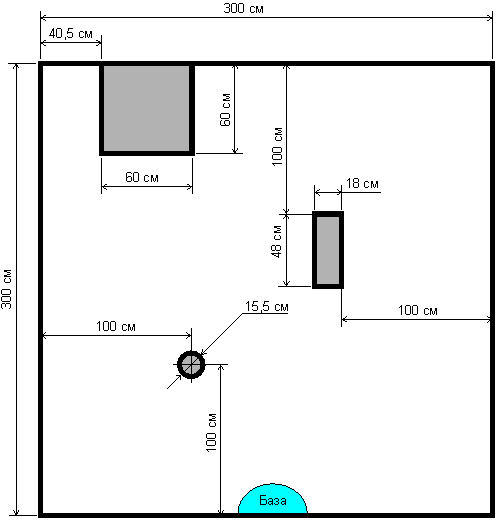
Для тестирования роботов-пылесосов в офисном помещении подручными средствами (коробки, перевернутый стол, колонки на боку и т. д.) было огорожено пространство 3 на 3 м. Напольное покрытие этой арены — коммерческий ковролин с плотным петлеобразным ворсом, что является некоторым промежуточным вариантом между длинноворсным ковром и гладкой поверхностью. Имитацией возможных препятствий служат компьютерный корпус типичных размеров, цилиндр и тесный загончик глубиной 60 см и шириной на 5 см шире корпуса пылесоса в самом широком месте. Цилиндр служит некоторой имитацией небольшого препятствия типа ножки стола или дивана, вокруг которого нужно убрать мусор. Мы не стали создавать препятствия, имитирующие пороги, так как нет таких понятий, как стандартная высота порога и форма его профиля. При этом использование порога с регулируемой высотой или набора различных по высоте порогов, с целью, например, определения максимальной высоты порога, которую может преодолеть пылесос, привело бы к неоправданному усложнению тестов. Примерно по центру одной из стен помещается зарядная база с пылесосом на ней или, если базы нет, то сам пылесос. На схеме ниже указаны все геометрические параметры. Границы предметов и арены обозначены толстыми черными линиями, серым цветом закрашены площади недоступные для пылесоса.
В качестве имитации мусора мы выбрали длиннозерный шлифованный рис.

Это не самый типичный тип мусора, однако относительно крупные и заметные на черном фоне зерна позволяют легко контролировать качество и особенности уборки. К тому же очистка территории от рисовых зерен между тестами занимает относительно мало времени, что было бы совсем не так в случае мусора с мелкими частицами.
Перед каждым тестом рис в количестве 100 г вручную и по возможности равномерно распределяется по всей доступной пылесосу площади. После уборки количество риса в пылесборнике определяется как по разнице масс заполненного и пустого пылесборника, так и взвешиванием риса, высыпанного из пылесборника. Во втором случае также контролируется количество постороннего мусора. Масса в граммах собранного риса соответствует проценту уборки. В идеальном случае пылесос должен собрать 100 г или 100%. Конечно, этот тест показывает только то, как пылесос справляется с уборкой данного вида мусора и в данных условиях, поэтому к полученным результатам нужно относиться с большой осторожностью.
| Режим | Время уборки*, ММ:СС | % |
| Авто | 7:45 | 70,5 |
| Авто+Турбо | 5:58 | 80 |
| Авто+Турбо+Уборка у стены | 5:52 | 78 |
| Максимум+Турбо+Уборка у стены | 54:хх | 92 |
| *От начала уборки до заезда на базу. | ||
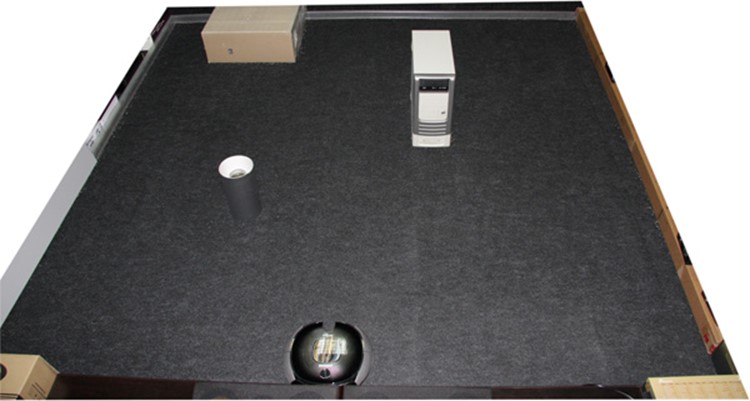
В таблице приведены результаты, полученные при первом запуске в указанных условиях. Последующие несколько запусков в режиме Авто+Турбо+Уборка у стены показали некоторую вариацию процента уборки (в пределах 4%) и времени уборки, которое зависит от вариации в траектории движения. В целом траектория всегда была одинаковой — змейкой от базы с однократным (многократным в режиме Максимум) обходом всей территории. Однако иногда случались задержки. Например, изредка, встретившись с препятствием, пылесос совершал многократные возвратно-поступательные движения с минимальным перемещением, после чего все же благополучно объезжал препятствие. Бывало, что на базу пылесос не мог заехать с первой попытки — отъезжал от базы на некоторое расстояние и пытался заехать на нее второй раз, третья попытка, как правило, уже не требовалась. Фотографии ниже получены перед началом одного из тестов, после уборки в режиме Авто+Турбо+Уборка у стены и после уборки в режиме Максимум+Турбо+Уборка у стены.

Перед началом одного из тестов.

После уборки в режиме Авто+Турбо+Уборка у стены.
После уборки в режиме Максимум+Турбо+Уборка у стены.
Видео ниже снято с одной точки с максимально возможным в наших условиях охватом убираемой территории (режим Авто+Турбо+Уборка у стены, база находится внизу по центру немного за границей кадра, при обработке видеоряд ускорен в пять раз):
Видео ниже снято в режиме слежения (режим Авто+Турбо+Уборка у стены, при обработке часть видеоряда ускорена в пять раз):
Проведенные тесты позволяют сделать некоторые предварительные выводы. Территорию уборки робот проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом. Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Траектория движения робота определяется исходным положением на базе — первый отрезок строго от базы и далее змейкой параллельно этому первому отрезку траектории. Форма помещения не играет никакой роли, например, если поместить базу в углу, направив ее по диагонали, то и змейка будет иметь диагональное направление. При боковом контакте с препятствием пылесос обычно совершает П-образный маневр объезда, иногда оставляя небольшой участок неубранным. Иногда на вроде бы ровном месте пылесос совершает маневр объезда, предположительно в этих местах резиновый скребок, расположенный за главной щеткой, цепляется за небольшие неровности ковролина. Пару раз между скребком и корпусом отсека главной щетки застревали рисовые зерна, скребок деформировался и мешал движению робота вперед.

При движении к базе после завершения уборки робот выключает привод главной щетки и вентилятора. С одной стороны не используется возможность дополнительной уборки при движении к базе, с другой — оставшийся заряд батареи расходуется более экономно, что увеличивает шансы того, что робот доберется до базы.
Качество уборки заметно повышается при выборе опции Турбо и практически не меняется при включении опции Уборка у стены. В режиме Авто с однократным проходом территории остается довольно много неубранных мест, как в центре площади, так и рядом со стенами и объектами, также из нескольких запусков в этом режиме робот ни разу не доехал до конца узкого загончика, в итоге там всегда оставался необработанный участок. В режиме Максимум (уборка до тех пор, пока батарея почти не разрядится) качество уборки очень высокое, фактически остаются неубранными только небольшие участки вдоль стен/препятствий. В этом режиме пылесос полностью заехал в загончик 4 раза. Таким образом, режим Автоследует использовать только в том случае, когда нужно убрать максимальную по площади территорию в минимальное время. Если время уборки не играет особой роли, то режим Максимум является более предпочтительным. По всей видимости, для уборки подобного типа мусора на данном виде покрытия боковые щеточки этого пылесоса малоэффективны в виду чрезмерной мягкости их ворса. Но на гладком покрытии эти щеточки наверняка будут работать с большей эффективностью.
Дополнительно были проведены тесты с использованием Virtualguard в режимах виртуальная стена и виртуальная дверь, никаких особенностей, заслуживающих описания обнаружено не было. Также была проверена способность пылесоса убирать «под диваном» (в нашем случае под ДСП 50 на 50 см, расположенной на высоте 12 см от пола) — убирает, несмотря на то, что камера пылесоса, как заявлено, делает снимки потолка. В режиме Пятно робот убирает по разворачивающейся змейке с прямыми углами, так как это демонстрирует видео ниже (ускорено в пять раз):
В местах, где робот «спотыкается» на ровном месте, он, видимо, задевает скребком за неровности покрытия, после чего объезжает это виртуальное препятствие.
Для измерения уровня шума микрофон шумомера мы располагали на расстоянии примерно 1,2 м от уровня пола, что примерно соответствует расстоянию от пола до уха сидящего на стуле человека. Пылесос запускался в режиме Пятно в месте под микрофоном, измерения проводились на первом витке спирали с выключенной и включенной опцией Турбо и в первые несколько секунд при движении пылесоса от точки под микрофоном к базе в режиме возврата на базу.
| Режим | Уровень шума, дБА, среднее (минимум/максимум) |
| Пятно | 61 (57/62) |
| Пятно+Турбо | 58 (54/61) |
| Возврат на базу | 47 (42/53) |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
При зарядке пылесоса на базе потребление от электросети равно примерно 35 Вт. Если пылесос включен и находится на базе, то от сети потребляется 10 Вт, что для режима фактического бездействия относительно много. Если находящийся на базе пылесос выключить кнопкой на пульте, то потребление снизится до 7,5 Вт. Если пылесос убрать с базы (или выключить его кнопкой на днище), то потребление упадет до 2 Вт — столько потребляет сама база, включенная в сеть. Отметим, что типичное для современных устройств потребление в ждущем режиме имеет порядок единиц десятых ватта.
Аккумуляторную батарею для этого пылесоса можно купить в сервисном центре, там же можно и заменить, но при желании замену батареи можно осуществить самостоятельно, открутив крышку на днище.
Выводы
Главной особенностью робота-пылесоса Samsung Navibot Silencio SR8895 является система ориентации и прокладка маршрута движения. Этот робот может в минимальное время обработать заданную территорию, оставив неохваченными совсем небольшие участки. Для быстрой ежедневной уборки такой способ является наиболее рациональным с точки зрения затраченного времени и ресурса робота, а также израсходованной электроэнергии. Для более тщательной уборки лучше использовать режим Максимум, в котором этот пылесос убирает вплоть до минимально допустимого уровня заряда батареи с необходимым запасом для возврата на базу. Не имея большого опыта тестирования подобных устройств, сложно выделить достоинства и недостатки, но, ориентируясь на то, что примерно хочется ожидать от устройства подобного уровня, составим следующий список:
Достоинства:
- Система ориентации Visionary Mapping
- Прокладка рационального маршрута
- Две боковые щетки
- Лючок для быстрого удаления пыли
- HEPA-фильтр
- Возможность установки насадки из микрофибры
- Работа с маяками в режимах «виртуальная стена» и «виртуальная дверь»
- Уборка в заданное время и ежедневная уборка
- Прозрачный корпус пылесборника
- Устойчивая база
- Тихая работа
Недостатки:
- ИК, а не радиочастотный пульт ДУ
- В режиме быстрой уборки встречаются необработанные участки
- Не самое высокое качество уборки впритык к препятствиям
Источник: ixbt.com





")








