Полноценное объективное тестирование роботов-пылесосов (и в частности — определение качества уборки) очень затруднено ввиду невообразимого количества возможных сочетаний конфигурации помещения и обстановки, типов поверхности и видов мусора — пыль, песок и крупные частицы, волосы, нитки и шерсть и т. п. и т. д. Однако ограничиваться только субъективными впечатлениями тоже не очень интересно. В итоге мы разработали некоторую компромиссную методику.
Тестирование можно разделить на две части: описательную и собственно сами тесты.
Описательная часть заключается в фотографировании, описании внешнего вида, комплектации, особенностей конструкции и тому подобных вещей, общих для любого теста любого устройства, поэтому подробно расписывать этот этап особого смысла нет. В первую часть входит также определение наиболее важных геометрических параметров тестируемого устройства, таких как габариты робота-пылесоса, длина кабелей и др. Для этого применяются рулетка, линейки и штангенциркуль.

Для тестирования роботов-пылесосов в офисном помещении подручными средствами (коробки, перевернутый стол, колонки на боку и т. д.) огораживается пространство 3×3 м. Напольное покрытие этой арены — коммерческий ковролин черного цвета с плотным петлеобразным ворсом, что является некоторым промежуточным вариантом между длинноворсным ковром и гладкой поверхностью. Имитацией возможных препятствий служат компьютерный корпус типичных размеров, цилиндр и тесный загончик глубиной 60 см и шириной на 5 см больше корпуса пылесоса в самом широком месте. Цилиндр служит некоторой имитацией небольшого препятствия типа ножки стола или дивана, вокруг которой нужно убрать мусор.
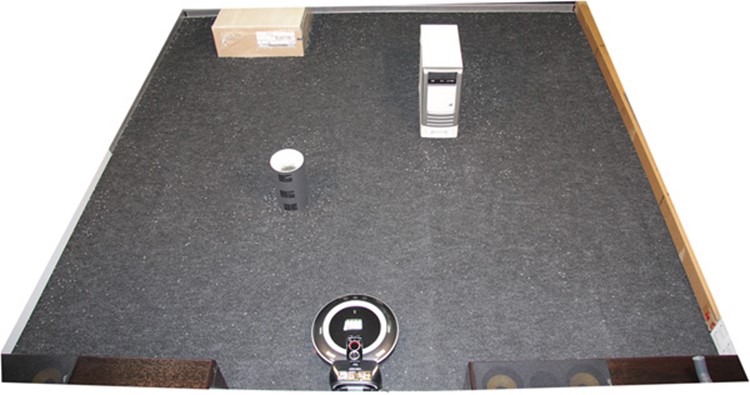
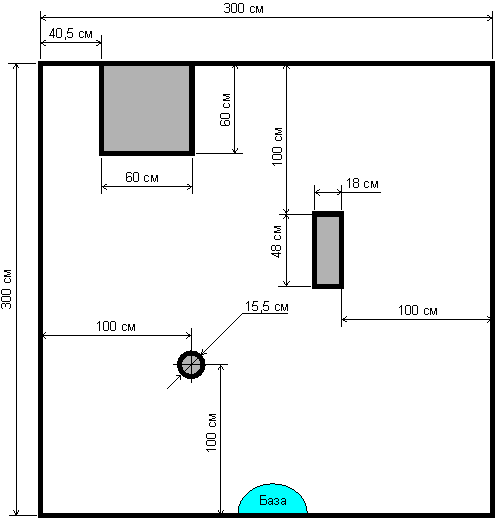
Мы не стали создавать препятствия, имитирующие пороги, так как не существует таких понятий, как стандартная высота порога и форма его профиля. При этом использование порога с регулируемой высотой или набора различных по высоте порогов с целью, например, определения максимальной высоты порога, которую может преодолеть пылесос, привело бы к неоправданному усложнению тестов. Примерно по центру одной из стен помещается зарядная база с пылесосом на ней или, если базы нет, сам пылесос. На схеме ниже указаны все геометрические параметры. Границы предметов и арены обозначены толстыми черными линиями, серым цветом закрашены площади, недоступные для пылесоса.
В качестве имитации мусора мы выбрали длиннозерный шлифованный рис.

Это не самый типичный вид мусора, однако относительно крупные и заметные на черном фоне зерна позволяют легко контролировать качество и особенности уборки. К тому же очистка территории от рисовых зерен между тестами занимает относительно мало времени, что было бы совсем не так в случае мусора с мелкими частицами. К достоинствам риса относится то, что он практически не поглощает влагу из воздуха, не растворяется в воде, не слеживается, и его всегда без проблем можно купить практически в любом продуктовом магазине. Все эти свойства выбранной имитации мусора позволяют максимизировать воспроизводимость результатов испытаний — пусть и в ущерб некоторой их натуральности.
Перед каждым тестом рис в количестве 100 г вручную и по возможности равномерно распределяется по всей доступной пылесосу площади. После уборки количество риса в пылесборнике определяется как по разнице масс заполненного и пустого пылесборника, так и взвешиванием риса, высыпанного из пылесборника. Во втором случае также контролируется количество постороннего мусора. Масса собранного риса в граммах соответствует проценту уборки. В идеальном случае пылесос должен собрать 100 г, или 100%. Конечно, этот тест показывает только то, как пылесос справляется с уборкой данноговида мусора и в данных условиях, поэтому к полученным результатам нужно относиться с некоторой осторожностью.
Для взвешивания риса применяются электронные весы DWP-1001, позволяющие взвешивать до 1 кг и имеющие дискретность отсчета 0,1 г и примерно такую же погрешность взвешивания.

Тестирование коротких циклов уборки производится несколько раз, длинные циклы (до истощения заряда аккумулятора) тестируются один-два раза. Если у пылесоса нет коротких циклов уборки или минимальная длительность цикла превышает 10 мин, то для имитации короткого цикла уборка принудительно прерывается через 10 минут. Наоборот, если у пылесоса нет цикла уборки до истощения заряда аккумулятора, то для имитации длинного цикла производится последовательный запуск коротких циклов уборки. В качестве результатов приводится таблица с указанием режимов, процента собранного мусора и затраченного времени от старта цикла до возврата на базу (или до окончания цикла, если базы нет). Перед началом каждого цикла проводится фотографирование убираемой поверхности с распределенным на ней имитатором мусора, также фотосъемка проводится и по окончании цикла, что позволяет анализировать особенности уборки. Кроме того, проводится видеосъемка части или всех коротких циклов уборки, как в режиме общего плана, так и в следящем режиме.
Дополнительно проводится тестирование работы специальных режимов, типа уборки в заданном месте, а также тестирование устройств типа маяк и/или виртуальная стена. Данные виды тестирования проводятся на модифицированном или полностью освобожденном от препятствий тестовом пространстве.
Уровень шума (вернее, уровень звукового давления) измеряется с помощью шумомера Октава-110А-Эко.

Микрофон шумомера располагается на расстоянии примерно 1,2 м от уровня пола, что примерно соответствует высоте уха сидящего на стуле человека. Измерения проводятся при том условии, что фоновый уровень шума в тестовом помещении не превышает 22 дБА. Пылесос запускается в режиме локальной уборки (если такой присутствует; если нет — то в обычном режиме) в месте под микрофоном. Измерения проводятся в первые несколько секунд после выхода пылесоса на рабочий режим, и пока он еще находится примерно под микрофоном. В качестве результата указываются средний, минимальный и максимальный уровни звукового давления (в дБА), полученные в режиме измерений Slow, который соответствует усреднению с временно́й константой равной 1 с.
Для оценки потребляемой мощности зарядная база (или блок питания в случае отсутствия базы) подключается к электросети через ваттметр Metrix PX110.
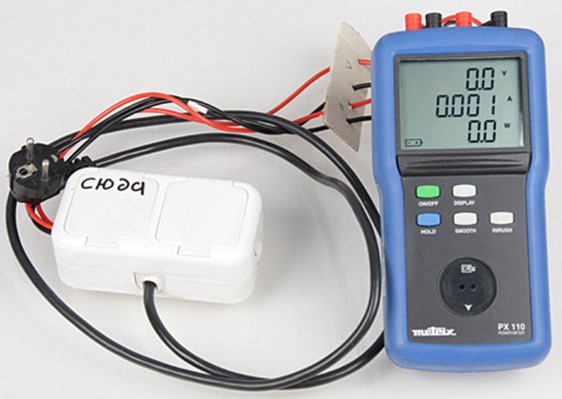
Измерения проводятся в начале зарядки аккумулятора пылесоса, в конце цикла зарядки и тогда, когда пылесоса нет на базе (или он отключен от блока питания).
В выводах подводится общий итог, где кратко обсуждаются основные особенности, а также перечисляются основные достоинства и недостатки протестированного устройства. Отметим, что составление этих списков является по большей части сугубо субъективным занятием, поэтому мы призываем читателей заниматься этим самостоятельно, используя весь материал статьи и другие доступные источники информации. Ведь все мы очень разные, и у каждого свои собственные приоритеты.
Источник: ixbt.com





")








