Рекламное описание этого робота обещает увеличенную в 5-8 раз силу всасывания по сравнению с другими роботами-пылесосами и всего 55 дБ шума, что, якобы, на 50% ниже, чем у конкурентов. За точное соответствие реальности данных чисел мы не ручаемся, но какая-то доля правды в этих обещаниях, как оказалось, присутствует.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора пыли | Вакуумная фильтрация |
| Пылесборник | 0,2 л, одно отделение |
| Основная щетка | Одна с ворсом |
| Боковые щетки | Две |
| Дополнительно | Резиновая юбка-скребок, УФ-лампа |
| Режимы очистки | До разряда аккумулятора, автоматический, локальная очистка, уборка по расписанию |
| Датчики препятствий | Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | ИК-датчик поиска базы, предположительно датчики вращения ведущих колес |
| Управление на корпусе | Механические кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодная индикация, звуковые сигналы и ЖК-дисплей на пульте ДУ |
| Время автономной работы | До 90 мин |
| Способ зарядки | На зарядной базе с автоматическим возвратом + прямая зарядка от БП |
| Батарея | Литий-полимерный аккумулятор, 14,8 В, 2500 мА·ч (37 Вт) |
| Масса | 2,7 кг |
| Размеры (диаметр×высота) | 345×95 мм |
| Комплект поставки* |
*Комплект поставки лучше уточнять перед покупкой. |
| Ссылка на сайт производителя | www.agaitech.com |
Внешний вид

Пылесос в плане имеет круглую форму, но не совсем, так как радиус полукруглого бампера немного больше радиуса окружности корпуса.

Края немного круглены и снизу скошены, но на бампере есть выступающий вперед бортик, что уменьшает вероятность наезда робота на препятствия, с которых он не сможет слезть.
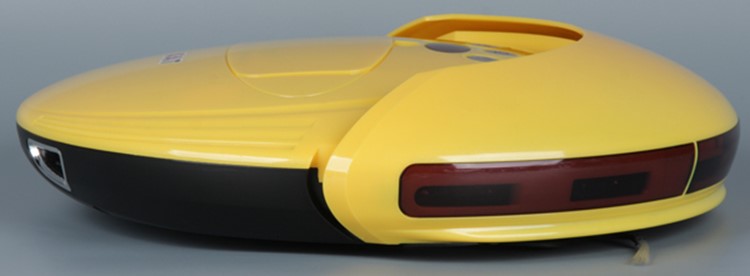
Корпус пластиковый. Нам достался вариант с ярко-желтым оформлением. Мы считаем, что яркий заметный цвет для робота является преимуществом, так как его будет легче находить в темных закоулках помещения в случае непредвиденной остановки (а она время от времени случается с любым роботом), также, хоть это и может показаться смешным, заметность робота понижает вероятность того, что на него случайно наступят. Есть у данного вида техники дурацкая привычка путаться под ногами. Верхняя панель и бампер изготовлены из пластика желтым покрытием с мелкими блестками. Днище — из черного пластика с матовой поверхностью. Сверху находятся три механические кнопки, имеющие серебристое покрытие, а рядом с ними — яркие красно/белые светодиодные индикаторы. Рядом с кнопками есть овальное окошко из тонированного прозрачного пластика, за которым расположен ИК-приемник. Окошко, кнопки и индикаторы напоминают стилизованный отпечаток кошачьей лапы. Тему кошек поддерживают и узнаваемые силуэты с ушками и загнутыми хвостами вокруг кнопок, а завершает фотография длинношерстной кошки на коробке. В центральной части верхней панели находится крышка отсека пылесборника, фиксирующаяся с помощью выступов и магнитика.

На переднем бампере есть вставки из тонированного прозрачного пластика, за которыми просматриваются ИК-датчики поиска базы и обнаружения препятствий.

Сверху кожух бампера заходит далеко назад, он и является самой верхней точкой пылесоса, определяющей минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться. Такая конструкция, возможно, уменьшает вероятность того, что робот застрянет под диваном, тумбочкой и прочими предметами мебели. Сзади обнаруживаются два отверстия с блестящими ободками, через которые выдувается воздух, разъем питания для зарядки минуя базу и загадочная вставка с небольшим фильтром.


Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, боковые щетки, основную щетку, всасывающую щель в обрамлении резиновой юбки-скребка, УФ-лампу в зеркальной нише и два ведущих колеса на подпружиненных рычагах. В передней части днища ближе к краю расположены три ИК-датчика перепада высоты.

База, на которой пылесос подзаряжается, относительно большая, но оснащена внешним адаптером питания.

Снизу на основании базы приклеены небольшие резиновые ножки.

Для дополнительно фиксации базы в случае гладких стен можно использовать входящие в комплект поставки присоски. Сзади на базе есть соответствующие проушины.

Комплектный пульт ДУ можно хранить специально нише на базе.

Кнопок на пульте немного, но они мелковаты, как и подписи к ним.

Подсветки кнопок и ЖК-индикатора нет. Материал корпуса ДУ и базы — белый пластик с зеркально-гладкой поверхностью.
Комплектация минимальная — кроме упомянутого есть два запасных фильтрующих элемента и руководство пользователя.
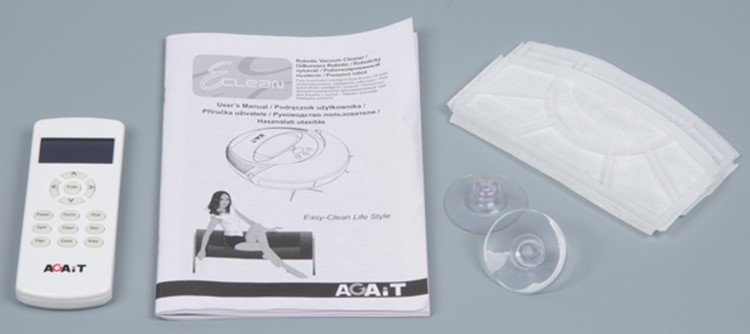
Русский текст в руководстве присутствует, но так как он идет вперемешку с текстами на нескольких других языков, то понять что-либо в этом документе очень сложно. Упакован пылесос в не очень большую коробку с пластиковой ручкой.

Функционирование
О функциях пылесоса можно попытаться прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с сайта компании-производителя, и внимательно его изучить.
Оси ведущих колес расположены примерно на диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте почти без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Наши измерения показали, что ширина робота равна 357 мм, длина — 349 мм, высота до самой верхней точки — 89 мм, а масса — 2,3 кг. Диаметр ведущих колес относительно небольшой, а ход шарниров в точке центров колес достигает всего 10 мм, поэтому проходимость робота оценочно находится на уровне преодоления препятствия в виде нетолстого ковра. Колеса вручную прокрутить невозможно (видимо, используется червячный редуктор), это осложняет вытаскивание робота из-под низких предметов мебели. Резиновые протекторы на колесах не очень удачной формы, так как в глубоких и узких щелях плотно застревает мусор среднего размера. В частности выковырять оттуда рисинки было весьма непросто.
При уборке передние боковые щетки с щетинками в трех пучках стараются подгрести мусор к центру. У этих щеток есть упругие поводки, и щетина у них не очень длинная, поэтому они не должны быстро разлохмачивается или ломаться. Менять боковые щетки не очень удобно, так как для этого нужно отвинтить центральный винтик с помощью мелкой крестовой отвертки.

Основная щетка с щетиной подхватывает крупный и мелкий мусор, который затем засасывается через щель, обрамленную резиновой юбочкой. Для очистки от намотавшихся ниток/волос щетку можно вынуть из отсека. Мусор с потоком воздуха переносится в пылесборник, где и остается — тяжелый мусор просто падает на дно, а легкий задерживается сменным воздушным фильтром. Можно считать, что данное устройство является пылесосом в классическом смысле, так как мусор фактически переносится только потоком воздуха, щетки имеют вспомогательную функцию.
Пылесборник имеет простейшую конструкцию — это коробочка из прозрачного пластика, у которой вместо одной стенки вставляется фильтрующий элемент, а в стенке напротив в верху есть прорезь, прикрытая легкой пластиковой шторкой, через которую засасывается мусор.

Вынимать и очищать такой пылесборник очень просто и удобно. В отсеке, куда вставляется пылесборник, есть резиновые уплотнители, уменьшающие утечки всасывающего воздушного потока. Сила всасывания относительно большая, но при засорении фильтра она резко уменьшается, и эффективность пылесоса заметно падает. Поэтому фильтр чистить лучше почаще, желательно после каждого запуска.
Воздушный фильтр пылесборника многоразовый, но не вечный, поэтому является расходным материалом, который доступен в продаже, так же как и боковые щеточки, основная щетка, аккумуляторная батарея и т. д. Заменить батарею без труда может сам пользователь, вооружившись только небольшой крестовой отверткой.

Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Данный пылесос, на сколько мы разобрались, имеет три основных режима уборки:
Clean — автоматическая уборка всей доступной площади в течение какого-то времени.
Max — автоматическая уборка всей доступной площади до разряда аккумулятора.
Spot — интенсивная очистка определенного участка. В нужное место пылесос переносится или направляется пользователем в режиме ручного управления.
Ручное управление движением осуществляется с помощью пульта ДУ. С пульта доступны команды поворот вправо-влево и движение вперед-назад. В этом режиме пылесос издает информационно-предупреждающие звуковые сигналы, но не убирает, только перемещается.
Есть режим запуска уборки по расписанию — можно указать день/дни недели и время, когда нужно начинать уборку и когда ее заканчивать. Логику работы в этом режиме мы определяли очень долго. Оказалось, что задание работы по расписанию можно производить только тогда, когда робот не находится на базе, однако робот начинает уборку только с базы, текущее время устанавливается с пульта, но при этом часы на пульте не идут, что более чем странно. Тем не менее, уборка по расписанию работает.
О своем состоянии пылесос информирует с помощью светодиодных индикаторов и звуковых сигналов (писка).
Тестирование
Ниже представлены результаты тестирования по нашей методике.
| Режим | Время уборки*, мин:сек | Доля убранного мусора, %% |
| Clean | 84:43 | 92,1 |
| Clean | 30:44 | 79,0 |
| Max | 100:19 | Н/Д |
| Фиксированный интервал, первые 10 мин | 10:00 | 45,8 |
| Фиксированный интервал, вторые 10 мин | 10:00 | 71,3 (суммарный) |
| Фиксированный интервал, третьи 10 мин | 10:00 | 80,3 (суммарный) |
| Фиксированный интервал, первые 10 мин | 10:00 | 52,2 |
| Фиксированный интервал, вторые 10 мин | 10:00 | 71,4 (суммарный) |
| Фиксированный интервал, третьи 10 мин | 10:00 | 82,7 (суммарный) |
| *От начала уборки до заезда на базу. | ||
Во время уборки робот перебирает несколько вариантов движения, выбираемых в каком-то порядке. Это: с виду хаотичное движение от препятствия до препятствия с последующей сменой направления, вдоль стен/препятствий, по разворачивающейся спирали и по разворачивающейся спирали в виде полигона. Независимо от варианта движения робот всегда убирает — вращает боковыми и основной щетками и прогоняет воздух вентилятором. Однако при движении к базе после окончания уборки после разряда аккумулятора или по команде пользователя вентилятор и щетки выключаются, что увеличивает шансы попадания пылесоса на базовую станцию.
Возврат на базу процесс очень неторопливый, у нас даже возникают опасения, что в случае реальной квартиры с несколькими помещениями робот вообще не сможет добраться до своей станции подзарядки. При уборке по расписанию время возврата задается. В режимах Clean и Max по идее робот сам должен определять момент по истечении какого-то времени или по разряду аккумулятора, когда возвращаться на базу, но в реальности этого почти никогда не происходит, и робот просто замирает на месте. А дальше пользователь или сам переносит его на базу, или, если хватает терпения, запускает режим самовозврата. Впрочем, один раз нам повезло наблюдать, как по окончании уборки в режиме Clean робот самостоятельно вернулся на базу. С базовой станцией робот обращается довольно аккуратно — он сметает мусор с ее основания, бывает, что слегка ее толкает, но далеко с исходного места базу не сдвигает.
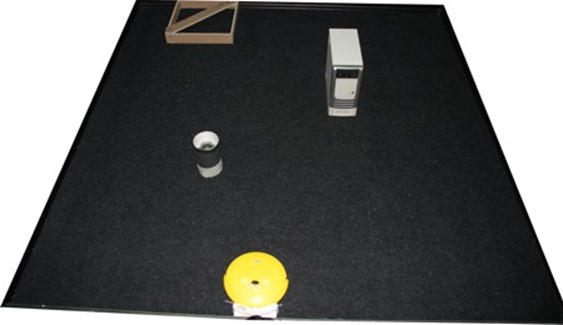
Отметим, что очень темный пол недостаточно отражает сигнал датчиков отрыва, поэтому на нашем черном ковролине робот определял отсутствие пола и отказывался убирать до тех пор, пока мы не заклеили окошки датчиков на днище кусочками от CD-ROM, закрепленными липкой лентой, отражающим слоем к датчикам. Такая сложная конструкция потребовалась из-за того, что излучатель и приемник датчиков отрыва находятся не в нише, а практически на уровне днища.
Узкий загончик (шириной примерно на 5 см шире корпуса робота) не представлял для пылесоса особо сложной задачи — он часто в него заезжал, а, заехав, проводил в нем не очень много времени. Датчиков глобальной ориентации у робота нет, поэтому он не строит карту, не отслеживает убранные/неубранные участки и не знает своего текущего положения относительно базовой станции, стен и других препятствий. Робот использует ИК-датчики для раннего обнаружения препятствий и замедления перед ними, но все равно движется до срабатывания механического бампера. При этом темные предметы робот дистанционно не определяет и врезается в них на полной скорости (впрочем, не очень большой).
Заметим, что используемый модельный мусор — рис — представлял для этого робота сложную задачу, так как даже с таким мощным вентилятором засасывать рис с пола не очень просто. Гораздо лучше убирает пылесос легкий мусор, что было видно по количеству «постороннего» мусора на фильтре этого аппарата, даже после многократных запусков его конкурентов на данном тестовом участке. Впрочем, итоговый процент собранного «мусора» (риса) оказывался довольно высоким и пылесборник быстро наполнялся почти на половину своего объема:

Так выглядит тестовая поверхность пола после 10 минут уборки:

А так после 1 часа и 40 минут:
Стало гораздо чище, при этом робот неплохо убрал в загончике и вдоль стен:

Но по площади разбросанный рис остался:

Почему — описано выше.
В режиме локальной очистки (Spot) робот убирает по разворачивающейся и, видимо, бесконечной (ну или с радиусом больше 1,5 м) спирали, так как это демонстрирует видео ниже:
На больших витках перекрытия убираемой площади уже не наблюдается, и вообще реализация этого режима немного странная.
Уровень шума мы измеряли в режиме локальной уборки, в котором робот дольше движется вблизи микрофона:
| Уровень шума, дБА |
| 57,5 |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. Робота можно считать не очень громким, также звук от работы робота нельзя назвать очень неприятным.
При начале зарядки пылесоса на базе потребляемая мощность от электросети составляет максимум 33 Вт. На полный заряд батареи уходит примерно 2 часа 30-35 минут. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 1,8 Вт (относительно мало). Если пылесос убрать с базы, то потребление упадет до 0,9-1,0 Вт — столько потребляет сама база, включенная в сеть.
Выводы
Внешне робот яркий и симпатичный, а усердно эксплуатируемая кошачья тема наверняка многих не оставит равнодушными. По принципу сбора мусора этот агрегат близок к обычному пылесосу, так как в пылесборник мусор перемещается только потоком воздуха, щеточки выполняют исключительно вспомогательную функцию — сгребают и подбрасывают. При этом робот отличается наличием мощного вентилятора, и, видимо, достаточно хорошо убирает легкий мусор. И даже с нашим трудным для него вариантом в виде риса справился не так уж и плохо. Следствием такой реализации является то, что при засорении фильтра эффективность этого уборщика резко падает, поэтому чистить фильтр и опустошать пылесборник желательно после каждого запуска. Впрочем, благодаря простой и эргономичной конструкции пылесборника очистка не представляет никакой сложности. Продвинутые функции — автоматический возврат на базу и уборка по расписанию — имеют свои недостатки, так как первый процесс очень неторопливый, а разобраться в том, как составляется расписание и устанавливаются часы, весьма непросто. Подведем итоги:
Достоинства:
- Высокая сила всасывания и относительно тихая работа
- Простой и удобный в использовании пылесборник
- Симпатичный дизайн
- Возможность уборки в заданное время и в заданные дни недели
- Дезинфицирующая УФ-лампа
- Есть пульт ДУ с ЖК-индикатором
Недостатки:
- Медленный и неуверенный возврат на базу
- Непостижимая процедура задания расписания уборки
- Трудное для понимания руководство пользователя
Источник: ixbt.com





")








