В отличие от протестированной ранее базовой модели 500-й серии (см. статью про iRobot Roomba 521) iRobot Roomba 780 принадлежит к продвинутой 700-й серии и отличается расширенной комплектацией.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора мусора | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | AeroVac 2, одно отделение, встроенный вентилятор |
| Основная щетка | Две: с резиновыми лопастями и с ворсом |
| Боковые щетки | Одна |
| Дополнительно | Нет |
| Режимы очистки | Обычный, локальная очистка (Spot), ручное управление, уборка по расписанию |
| Эффективность очистки | Нет данных |
| Уровень шума | Нет данных |
| Датчики препятствий | Механический передний и боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | ИК-датчик поиска базы и определения виртуальных стен, датчик вращения подруливающего ролика, датчики вращения ведущих колес (?) |
| Управление на корпусе | Механическая кнопка и сенсорные кнопкии |
| Дистанционное управление | ИК-пульт ДУ (опционально — РЧ-пульт Wireless Command Center) |
| Оповещение | Светодиодная индикация, звуковые сигналы и голосовое оповещение об ошибках |
| Время автономной работы | Нет данных |
| Время зарядки | 3 часа |
| Способ зарядки | На зарядной базе с автоматическим возвратом или от блока питания |
| Батарея | Аккумулятор Advanced Ni-MH 14,4 В, 3000 мА·ч |
| Потребляемая мощность | Нет данных |
| Масса | 3,8 кг |
| Размеры (диаметр×высота) | 353×92 мм |
| Особенности | HEPA-фильтр, определение заполнения пылесборника, датчик загрязнения Dirt Detect 2 (акустический и оптический сенсоры) |
| Комплект поставки |
|
| Ссылка на сайт производителя | www.irobot.ru |
| Цена | $451 |
Внешний вид

Отметим, что пылесос попал к нам на тесты в уже бывшем в употреблении состоянии, поэтому в частности его корпус местами слегка поцарапан и на нем присутствуют небольшие пятна от чего-то, что испортило пластиковые поверхности. Пылесос в плане имеет практически идеально круглую форму.

Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.

Корпус пластиковый, в основном черный и с матовой поверхностью. Большая по площади кольцеобразная часть верхней панели имеет серо-серебристое покрытие с зеркально-гладкой относительно устойчивой к повреждениям поверхностью. Это кольцо окаймлено деталями с матовым серебристым покрытием, а в центре располагается вставка из темного полупрозрачного пластика, сквозь который просвечивают светодиодные индикаторы (значки сенсорных кнопок, значок зарядки, сегментный индикатор часов и т. д.).

В самом центре верхней панели находится круглая кнопка с зеркально-гладкой хромированной поверхностью. Ободок этой кнопки, значок и надпись на ней подсвечиваются светодиодным индикатором, меняющим цвет от зеленого до красного в зависимости от состояния АКБ. Сверху есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить. Под ручкой спрятан прикрытый резиновой заглушкой сервисный разъем. Нижняя часть бампера окантована резиновой вставкой, верхняя половина бампера прикрыта вставкой из пластика черного с виду, но прозрачного для ИК-излучения.

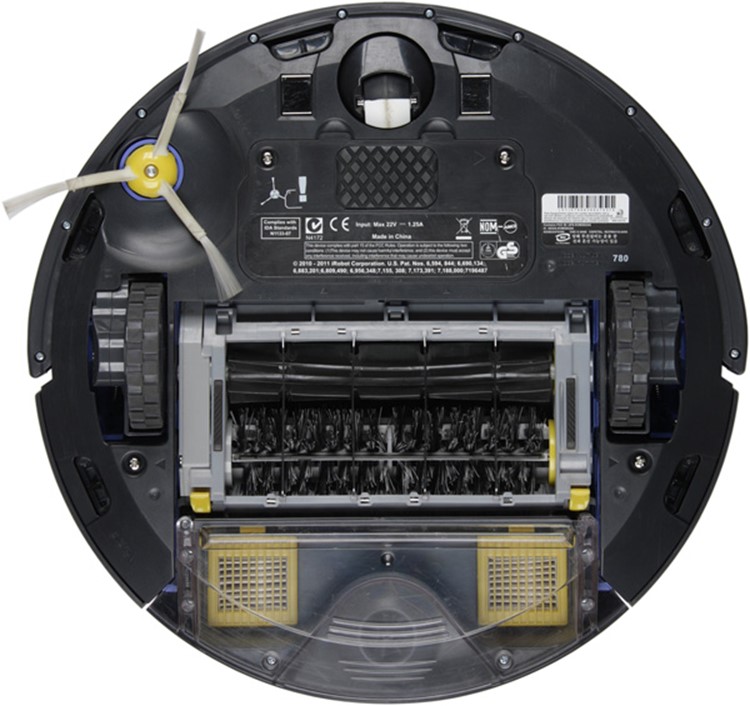
Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться. Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, боковую щетку, крышку отсека АКБ, два ведущих колеса на подпружиненных рычагах, серый отсек с основными щетками и прозрачное днище отсоединяемого пылесборника. По периметру днища ближе к краю расположены шесть окошек ИК-датчиков перепада высоты.
База, на которой пылесос подзаряжается, имеет внешний блок питания, поэтому она небольшая и легкая. (Длина отсоединяемого кабеля питания равна 100 см, длина кабеля от БП — 95 см.)

Снизу на основании базы приклеены небольшая резиновая и площадка побольше из пористого пластика. Однако базу все равно легко (непреднамеренно) сдвинуть с места, поэтому, даже, несмотря на то, что сам пылесос обращается с базой очень аккуратно, будет иметь смысл закрепить базу на полу с помощью, например, двусторонней клейкой ленты, или можно поставить базу в угол, направив ее из угла и проконтролировав, что робот может без проблем к ней подъехать. Преимуществами использования внешнего БП являются как минимум два момента: во-первых, в случае выхода из строя менять/ремонтировать можно только БП, а не базу целиком, и, во-вторых, пылесос можно подзаряжать напрямую от БП, для чего на корпусе пылесоса предусмотрен разъем питания. Недостатков как минимум тоже два: база легче (см. выше) и размещать на полу нужно базу и БП, что не всегда просто сделать аккуратно с эстетической точки зрения. (Впрочем, на сайте производителя можно встретить упоминание об альтернативной базе — Standard Home Base, — которая с виду больше, а значит устойчивее.)
Пылесос комплектуется ИК-пультом ДУ и двумя навигационными устройствами. Кроме того, стандартный ЗИП включает в себя комплект запасных щеток, пару фильтров и два инструмента для очистки щеток.

Документация состоит из описания гарантийных обязательств, краткого руководства пользователя, DVD с видеоматериалами (перевод на русский язык в виде субтитров) и руководствами пользователя в виде PDF-файлов, в том числе и на русском языке. Упакован пылесос в относительно большую коробку с пластиковой ручкой.

Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя, и внимательно его изучить.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (71 мм), а ход шарниров в точке центров колес достигает 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Потенциально робот способен преодолевать препятствия высотой где-то до 20 мм — примерно такое расстояние от пола до нижней точки бампера пылесоса.
При уборке передняя щеточка подгребает мусор к центру. Правильной работе этой щеточки способствует наклон ее оси внутрь, благодаря чему прижим сильнее на фазе движения сбоку-вперед. Также отметим конструкцию боковой щеточки — гибкие упругие поводки заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает весьма эффективно и не теряет свою форму.
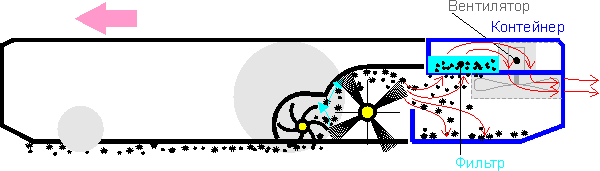
Основных щеток две, они вращаются навстречу друг другу. Сначала резиновая щетка-скребок перемещает крупный мусор, затем вторая щетка со щетиной и скребками подхватывает крупный и мелкий мусор и перебрасывает его в пылесборник. Инерционное перемещение мусора дополнено воздушным потоком, который проходит через вращающиеся щетки и два HEPA-фильтра, задерживающие весь мелкий мусор. Примерная схема, представленная ниже, демонстрирует основной принцип сбора мусора:
Днище пылесборника выполнено из прозрачного пластика, но особой пользы это не приносит, так как взглянуть на него можно только или перевернув пылесос днищем вверх или вынув пылесборник. Очищать пылесборник относительно просто: откидывается шторка и пыль вытряхивается.

При необходимости вынимаются и очищаются два HEPA-фильтра в желтых корпусах.

Воздушный вентилятор встроен в корпус пылесборника, поэтому сам пылесборник недопустимо мыть под водой. Отсоединять пылесборник относительно удобно и после некоторой тренировки это можно делать одной рукой, не сдвигая припаркованный на базе пылесос. Выдувается воздух через решетку на задней стенке пылесборника.

Отсек, в котором находятся основные щетки, закреплен на шарнире, поэтому с ходом примерно в 9 мм он следует рельефу пола, скользя на проволочных направляющих. Щетка-скребок выступает за направляющие примерно на 1,5-2 мм, а щетина второй щетки выступает на 2-3 мм. В итоге достигается хорошая эффективность работы щеток на неровных поверхностях с практически любым типом покрытия. Для очистки щетки вынимаются из отсека. Щетку со щетиной можно чистить с помощью прилагаемого инструмента в виде кольца с зубчиками. Второй инструмент пригодится при удалении намотавшихся ниток и волос. Для более тщательной очистки щеток можно снять торцевые заглушки с подшипниками (из бронзы). Впрочем, часто очищать приходится только торцы первой щетки-скребка, куда наматываются (не очень плотно) волосы и другие длинные волокна.

В продаже доступны воздушные фильтры, боковая щеточка, основные щетки и другие изнашиваемые детали и узлы, в частности, аккумуляторная батарея.

Заменить батарею может сам пользователь, вооружившись только крестовой отверткой среднего размера. Полный список аксессуаров и расходных материалов можно увидеть на сайте компании-производителя.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
iRobot Roomba 780 имеет три основных режима уборки:
- Автоматическая уборка всей доступной площади. По окончании уборки пылесос возвращается на базу.
- Режим локальной очистки (режим Spot) — интенсивная очистка определенного участка. В нужное место пылесос переносится пользователем или направляется с помощью пульта ДУ. По окончании цикла пылесос останавливается примерно в исходной точке.
- Режим с ручным управлением.
Запускаются режимы нажатием кнопок на корпусе пылесоса или на пульте ДУ: CLEAN — запуск в обычном режиме, SPOT — режим локальной очистки. Нажатие на кнопку DOCK — включает режим принудительного возврата на базу. Запуск автоматического режима уборки можно назначить на определенное время в любой день недели, при этом время запуска устанавливается (или не устанавливается) своё на каждый из семи дней. Если расписание создано, то в заданное время пылесос съедет с базы, проведет уборку и вернется на базу.
Пульт ДУ позволяет вручную управлять движением (и уборкой, так как одновременно с передвижением пылесос убирает) робота.

Команд движения всего пять: вперед, повороты на месте вправо и влево, движение вперед с поворотом вправо или влево. Команды движения назад нет. Робот движется только тогда, когда нажата кнопка пульта. При столкновении с препятствием пылесос автоматически выполняет маневр уклонения, а при движении вблизи базы автоматически включается режим возврата на базу.
Пространственно организовать уборку помогут навигационные устройства, входящие в комплект поставки (и, при необходимости, докупаемые дополнительно).

Эти устройства работают от двух элементов питания типа LR14 (или C, или А343, можно использовать и солевые). Устройства могут работать в двух режимах — виртуальная стена (Virtual Wall) и маяк(Lighthouse). В первом случае в направлении от устройства создается виртуальная преграда, которую пылесос не пересекает. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Режим маяка используется для установления последовательности уборки: заехав в помещение/закуток, ограниченное маяком, пылесос останется в нем, пока не уберет это пространство. Режим работы и длина виртуального барьера выбираются переключателями на корпусе устройства. Включаются устройства автоматически при запуске пылесоса в режиме уборки, выключаются тоже автоматически после окончания уборки. Видимо, в режиме уборки пылесос периодически излучает соответствующий сигнал (скорее всего, радиочастотный), приняв который, устройства навигации автоматически активируются. Такой режим удобнее, чем ручное включение виртуальных стен, и существенно сокращает расход заряда элементов питания.
О своем состоянии пылесос информирует с помощью светодиодных индикаторов, кроме того, о переходах между некоторыми состояниями пылесос сообщает, проигрывая короткую мелодию, а об ошибках он информирует, проговаривая соответствующую фразу на выбранном пользователем языке (процедура смены языка описана в руководстве, русский язык доступен). Отключить звуковое/голосовое оповещение нельзя.
Тестирование
Ниже представлены результаты тестирования по нашей методике:
| Режим | Время уборки, ММ:СС | % |
| Автоматический | 18:18 | 89,7 |
| Автоматический | 21:51 | 94,6 |
| Автоматический | 27:51 | 96,3 |
| Фиксированный интервал, первые 10 мин. | 10:00 | 73,9 |
| Фиксированный интервал, вторые 10 мин. | 10:00 | 95,4 (суммарный) |
| Фиксированный интервал, третьи 10 мин. | 10:00 | 97,4 (суммарный) |
| Фиксированный интервал, четвертые 10 мин. | 7:03 | 98,2 (суммарный) |
| Фиксированный интервал, первые 10 мин. | 10:00 | 89,4 |
| Фиксированный интервал, вторые 10 мин. | 10:00 | 96,2 (суммарный) |
| Фиксированный интервал, третьи 10 мин. | 10:00 | 97,4 (суммарный) |
| До полного разряда АКБ | 57:41 | 98,3 |
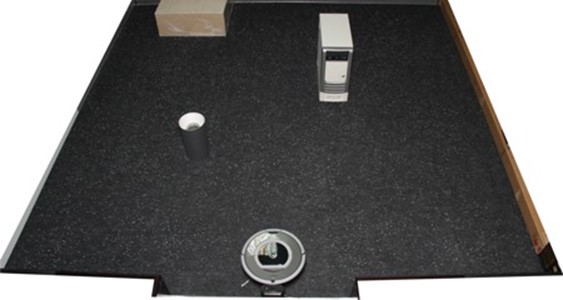
Проведенные тесты позволяют сделать некоторые предварительные выводы. В автоматическом режиме на уборку нашего тестового участка робот затрачивает порядка 20-30 мин (первый заход), после чего возвращается на базу. Как правило, за первый заход убирается более 90% мусора. Например, фотография исходного состояния убираемого участка:
После первых 10 минут уборки (убрано 89,4%):

После вторых 10 минут уборки (убрано 96,2%):

После третьих 10 минут уборки (убрано 97,4%):

Процент уборки довольно высокий. Неубранным участком всегда оставался полукруг с радиусом порядка 40 см вокруг базы:

То, что пылесос обходит базу стороной имеет и свои плюсы — не было случая, чтобы пылесос сдвинул базу после начала уборки. Также робот не может убрать небольшие участки в углах, куда не может ни заехать, ни дотянуться боковой щеточкой:

Можно предположить, что робот как-то оценивает убираемую площадь, например, исходя из среднего расстояния от препятствия до препятствия, и на основании этого определяет требуемое время уборки. В нашем случае это время можно считать близким к оптимальному, так как дальнейшее увеличение времени уборки (свыше 20-30 минут) уже не приводит к существенному росту процента убираемого мусора. Робот, видимо, не обладает способностью решать навигационные задачи дальнего порядка, впрочем, принимать решения относительно следующего направления движения, а также выбираться из сложных мест и выпутываться из проводов роботу помогают ИК-датчики приближения, механический бампер, отслеживание вращения ведущих колес и отслеживание перемещения с помощью оптического датчика, регистрирующего вращение подруливающего ролика (не зря он наполовину черный а на половину белый).
В тесте с худшим результатом за первый заход робот убрал 89,7%, впрочем, это был и самый короткий цикл уборки.
Судя по характеру движения во время уборки, робот перебирает несколько вариантов движения, выбираемых в зависимости от текущего состояния, какой-то предыстории и случайным образом. Мы определили три варианта, но, возможно, это не все (видимо, еще есть режим выпутывания из проводов):
Вариант первый — движение от препятствия до препятствия с последующей сменой направления. Используется для перемещения по комнате и из комнаты в комнату и, возможно, для оценки доступной площади.
Вариант второй — веерообразное движение с возвратом в исходную точку. Используется для очистки сильно загрязненных мест. При этом, видимо, используется информация с ультразвукового датчика грязи, размещенного в отсеке со щетками, и оптического датчика, расположенного перед пылесборником.
Вариант третий — обход препятствия по часовой стрелке и движение вдоль стены на небольшом расстоянии от препятствия (до срабатывания ИК-датчика приближения). Используется для очистки вокруг, например, ножек стула и т. д., а также вдоль стен.
Независимо от варианта движения робот всегда убирает — вращает боковой и основными щетками и прогоняет воздух вентилятором.
Узкий загончик (шириной на 5 см шире корпуса робота) не представлял для пылесоса особо сложной задачи — как правило, он заезжал в него в течение первого цикла уборки, а, заехав, довольно быстро из него выбирался.
Не было случая, чтобы робот не смог заехать на базу с первого раза.
Многократные запуски цикла уборки вплоть до разряда АКБ (перед тестом батарея была полностью заряжена) позволили достичь очень высокого процента сбора мусора (см. таблицу выше), при этом робот проработал почти час. На полный заряд батареи уходит примерно столько же времени — около одного часа. Однако нужно отметить, что, видимо, у тестируемого экземпляра (напомним, бывшего в употреблении неизвестный период времени) была нарушена калибровка аккумуляторной батареи, так как при ее почти полном разряде робот внезапно останавливался, сообщая о необходимости зарядки, вместо того, чтобы автоматически возвращаться на базу. Скорее всего, робот с новой АКБ может работать гораздо дольше и всегда сам возвращается на базу, но и цикл зарядки длится дольше одного часа.
При начале зарядки пылесоса на базе потребление от электросети равно 26-27 Вт. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 4,3 Вт. Если пылесос убрать с базы, то потребление упадет до 1,2 Вт — столько потребляет сама база, включенная в сеть.
В режиме локальной очистки (Spot) робот убирает по разворачивающейся и затем сворачивающейся спирали, так как это демонстрирует видео ниже (ускорено в пять раз):
В этом режиме робот убирает в круге диаметром немного больше 1 м, что демонстрируют две фотографии ниже, до и после уборки в режиме Spot:


Дополнительно были испытаны устройства навигации в режимах виртуальная стена (Virtual Wall) и маяк (Lighthouse). Работали они в точном соответствии с руководством пользователя.
Во всех режимах шумит робот примерно одинаково, только при резких маневрах заметно повышается шум приводов. Уровень шума мы измеряли в режиме локальной уборки, в котором робот дольше движется вблизи микрофона:
| Режим | Уровень шума, дБА, среднее (минимум/максимум) |
| Локальной очистки | 64,3 (62,6/65,0) |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА. Робот можно считать довольно громким. Впрочем, звук не является очень неприятным, слышно в основном работу блока основных щеток и не очень громкое завывание вентилятора. Запускать в ночное время его можно, но только в соседнем от спальной комнаты помещении, и желательно за дверями с хорошей звукоизоляцией. Отметим, что на результаты этого теста также сказалось то, что робот был в употреблении, так как согласно субъективной оценке новый робот 700-й серии работает заметно тише.
Выводы
Проведенные тесты позволяют сделать прямое сравнение продвинутой модели iRobot Roomba 780 с младшей протестированной ранее моделью iRobot Roomba 521. Пылесосы внешне похожи и некоторые их узлы идентичны или различаются незначительно, но 780 убирает все же заметно лучше. Видимо, этот результат обусловлен другой конструкцией пылесборника и усовершенствованным алгоритмом навигации 780-й модели.
Достоинства:
- Высокое качество уборки, в том числе вдоль стен и вокруг препятствий
- Режим уборки по расписанию
- Хорошая комплектация — ЗИП, пульт ДУ и устройства навигации
- Голосовое оповещение
Недостатки:
- Высокий уровень шума
- Отсутствует режим уборки до разряда аккумулятора
Источник: ixbt.com





")








