По внешнему виду и конструкции Samsung NaviBot-S SR8980 очень похож на протестированных ранее роботов этой компании Navibot Silencio SR8895 и Samsung Navibot S Pop-Out — для перечисления значимых различий между ними хватит и пальцев одной руки. Однако представляемая модель кардинально отличается своей базовой станцией — и не только ее размерами, но и тем, что с ее помощью пылесос способен самостоятельно опустошать свой пылесборник. При этом собранная пылесосом грязь скапливается в большом пылесборнике базы, объем которого раз в шесть больше пылесборника самого пылесоса. В итоге к удовольствию пользователя интервал периодичности обслуживания значительно увеличивается.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Емкость в пылесосе 0,3 л, емкость в базе 2 л |
| Основная щетка | Одна: ворс + скребки, ширина 204 мм |
| Боковые щетки | Две |
| Дополнительно | Резиновый скребок |
| Режимы очистки | Автоматический, локальный, интенсивный, ручной, однократно в заданное время, по расписанию по дням недели. Модификаторы: турбо и определение загрязнения |
| Эффективность очистки | 90% на 3×3 м за 10 мин. (скорость 0,32 м/с) |
| Уровень шума | 60 дБА |
| Датчики препятствий | ИК-датчики препятствий и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы и определения виртуальных стен, потолочная видеокамера, предположительно гироскоп и акселерометр (всего 12 датчиков) |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодный дисплей и звуковые сигналы |
| Время автономной работы | До 90 мин. |
| Время зарядки | Около 180 мин. |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Li-Ion, 14,4 В, 31,68 Вт·ч |
| Потребляемая мощность | 40 Вт при зарядке батареи, 600 Вт при очистке на базе |
| Масса | 3,2 кг |
| Размеры (диаметр×высота) | 350×80 мм |
| Особенности | Автоопустошение пылесборника, фильтр HEPA, создание карты (Visionary Plus) и выбор оптимального маршрута уборки, работа с маяками в режиме «виртуальная стена» |
| Комплект поставки* |
*Комплект поставки лучше уточнять перед покупкой. |
| Ссылка на сайт производителя | www.samsung.com/ru/ |
Внешний вид

Робот нам достался не новым, а слегка бывшим в употреблении. Особенно досталось коробке, из-за чего мы не приводим ее фотографию. В итоге мы получили возможность оценить изменение внешнего вида после какого-то срока эксплуатации. Согласно визуальной оценке, больше всего пострадала верхняя панель, на которой присутствовали заметные сколы и царапины, но в остальном робот выглядел более-менее опрятно. Пылесос имеет классическую круглую в плане форму корпуса.

Края сверху и снизу сильно скруглены и снизу скошены.

Скос снизу поможет преодолевать препятствия, и наоборот несколько выступающий бортик сверху снизит вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом. Сверху корпус прикрыт панелью из прозрачного пластика, имеющую снизу черное покрытие, кроме участков над индикатором и камерой. В оформление внесено разнообразие в виде боковых вставок из черного пластика и хромированной тонированной окантовки. Эти декоративные элементы обозначают места, за которые робота удобно брать при переноске двумя руками. Сверху в центре располагается контрольная панель с тремя сенсорными кнопками, имеющими крупные и контрастные значки, и многосегментным светодиодным индикатором. В передней части верхней панели находится круговая направленная вверх видеокамера для ориентации по потолку, а перед ней — выпуклое окошечко с пимпочкой, прикрывающее, видимо, датчик определения виртуальных стен. В задней части сверху находится кнопка фиксации пылесборника. В нижней части корпуса — по бокам и спереди, — а также сверху спереди имеются элементы из матового пластика, повреждения на котором не бросаются в глаза. Дополнительно в передней части снизу установлен бампер из упругого пластика.

Спереди, с боков и сзади есть вставки из зеркально-гладкого темного, но прозрачного для ИК-излучания пластика, за ними — ИК-датчики препятствий (спереди и с боков) и приемники сигналов с пульта ДУ (спереди и сзади). Сзади корпус завершается установленным пылесборником.

Перевернув пылесос вверх днищем, мы увидим две контактные площадки, подруливающий ролик, две боковые щетки, крышку отсека аккумулятора, два ведущих колеса на подпружиненных рычагах, красную кнопку выключения за защитным колпачком из упругого пластика, желтый отсек с основной щеткой и дно пылесборника.

Есть три ИК-датчика перепада высоты (окошки на днище близко к краю — спереди и около боковых щеток), благодаря которым пылесос не падает со ступенек.
В данном случае именно база представляет наибольший интерес.

Она большая, просто огромная, по данным производителя ее габариты (без фартука): длина 560 мм, ширина 357 мм и высота 260 мм. Вес тоже немаленький — несколько килограммов. Подключается база непосредственно к электрической сети, длина кабеля питания составляет 150 см. Корпус базы изготовлен в основном из пластика от светло-серого до черного цвета с матовой поверхностью. Вставки спереди и с боков из тонированого прозрачного для ИК-излучения пластика скрывают, по всей видимости, ИК-маячки парковки и дистанции.

Сбоку рядом с выводом кабеля питания есть механический выключатель питания. Благодаря выемке сверху базу удобно переносить одной рукой.

Основной вес базы приходится на встроенный в нее пылесос с заявленной мощностью в 600 Вт собственно этот пылесос и освобождает пылесборник робота. Воздух и грязь разделяются в основном циклонным способом — засасываемый воздух сильно закручивается, при этом пыль центробежной силой прижимается к стенкам циклонной камеры и через окошко выбрасывается в пылесборник. Оставшаяся пыль задерживается предмоторным фильтром, и тонкую очистку осуществляет HEPA-фильтр, распложенный после вентилятора. Четыре грибка сзади на базе не позволят перекрыть выхлопное отверстие при установке базы вплотную к стене. Емкость пылесборника выполнена из прозрачного и, видимо, из эстетических соображений слегка тонированного пластика. На пылесборнике есть метка заполнения, дополнительно о необходимости очистки сигнализирует индикатор на базе. Выемка сверху и удобно расположенный фиксатор позволяют с помощью одной руки снять пылесборник с базы, перенести его в место опустошения, затем второй рукой отжимается фиксатор дна пылесборника, и грязь свободно вываливается в подставленное мусорное ведро. Все очень удобно. Периодически нужно чистить циклонную камеру (в ней может что-то застрять), для чего снимается круглая крышка, фильтр пылесборника и выходной HEPA-фильтр.

На днище базы можно разглядеть противоскользящие площадки, а также воздуховод, по которому пыль высасывается из пылесборника робота.

Дно канала изготовлено из прозрачного пластика и может сниматься, для чего нужно повернуть голубые фиксаторы. Канал на днище выходит непосредственно в раструб большого пылесборника. То есть весь путь транспортировки грязи виден и доступен для очистки. Чтобы облегчить парковку и зафиксировать робота в нужной позиции спереди на базе есть ложбинки с ребристым дном. Дополнительно в случае ковровых покрытий производитель рекомендует установить специальную площадку (мы ее условно назвали фартуком), входящую в комплект поставки. С пристегнутым фартуком и так немаленькая база начинает занимать места, как большой домик для кошки. Сверху на базе есть четыре индикатора — питание, зарядка, автоматическая очистка и заполнение пылесборника (большого). Большая кнопка сверху отвечает за включение/выключение режима автоматической очистки, в котором пылесборник робота опустошается при каждом заезде на базу. Кармашка для пульта ДУ на базе не предусмотрено.
Пульт относительно небольшой и кнопок на нем немного. Обозначения кнопок читаются хорошо. Верхняя панель пульта изготовлена из черного маркого пластика с зеркально-гладкой поверхностью, но остальная часть — из более практичного матового черного пластика. К сожалению, пульт работает по ИК-каналу, поэтому для управления пылесосом он должен находиться в пределах прямой видимости и пульт нужно направлять примерно в сторону робота.

Из дополнительных аксессуаров и расходных материалов в комплект поставки вошли только две виртуальные стены (без элементов питания), кисточка-гребенка и запасной HEPA-фильтр для пылесборника робота. Упакован пылесос и все к нему в большую коробку, размерами 456 на 289 на 639 мм, и весит это все 12,2 кг (по данным производителя).
Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя, и внимательно его изучить. Правда, отметим, что у нас было только краткое руководство на нескольких европейских языках (хоть английский был, и то хорошо). Однако на момент написания статьи на русской версии сайта компании уже появился PDF-файл с руководством на русском языке.
Кинематическая схема «классическая»: оси ведущих колес расположены на одном диаметре окружности корпуса. Это и круглый корпус позволяют устройству совершать разворот на месте без изменения границ, занимаемой роботом площади. Наши измерения дали близкие к паспортным массогабаритные величины: ширина 350 мм, длина 350 мм, высота 81 мм, масса 3,1 кг. Отметим, что высота относительно небольшая, что увеличивает доступную для уборки площадь. Диаметр ведущих колес относительно большой, они имеют глубокий протектор из нескользящего резиноподобного материала, а вертикальное перемещение колес на подпружиненных рычагах подвески составляет примерно 22 мм, поэтому робот отличается неплохой проходимостью. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 1 см при благоприятной форме перехода.
При уборке две передние боковые щеточки подгребают мусор к центру, затем основная щетка перебрасывает его в пылесборник. У боковых щеток есть упругие поводки, и щетина у них не очень длинная, поэтому они не должны быстро разлохмачиваться или ломаться. На основной щетке есть три ряда пучков ворса и три ряда скребков-пластинок из упругого материала. Данная модель не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности пыль не засасывается. Примерная схема, представленная ниже, демонстрирует основной принцип сбора пыли:
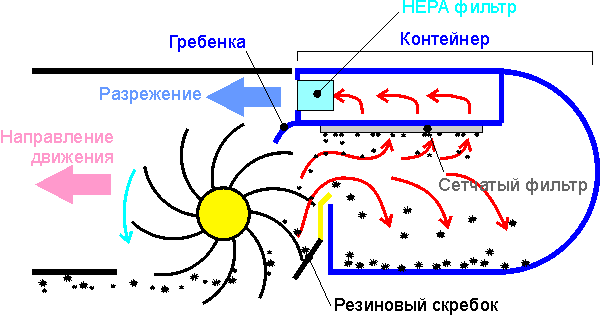
Тяжелые частицы забрасываются главной щеткой в отсек пылесборника, а легкие частицы засасываются в верхнюю часть пылесборника, где задерживаются грубым сетчатым фильтром, а особо мелкие пылинки отфильтровываются HEPA-фильтром. Дополнительно нитки и волокна снимаются с основной щетки гребенкой на пылесборнике.
Корпус пылесборника частично выполнен из прозрачного слегка тонированного пластика, что позволяет визуально контролировать его наполнение, по крайней мере, пока его стенки не сильно загрязнены. По всей видимости, в самом пылесосе пылесборник просвечивается парой ИК-датчик/ИК-приемник, что позволяет пылесосу определять места с повышенной загрязненностью по уменьшению светопропускания из-за частиц грязи, забрасываемых щеткой. Для очистки пылесборник нужно отсоединить от корпуса пылесоса, откинуть синюю крышку и вытряхнуть накопившуюся грязь, а лучше отсосать ее обычным пылесосом.

Им же можно почистить HEPA- и сетчатый фильтры. Кстати, все фильтры, включая фильтры базы, можно мыть под водой. Главное — хорошо их просушить перед установкой на место. Есть три полезных особенности в конструкции пылесборника робота. Во-первых, пластиковая шторка не даст высыпаться грязи при переноске пылесборника, во-вторых, специальный толкатель не даст установить пылесборник без HEPA-фильтра, в-третьих, есть блокиратор, который предотвращает отсоединение пылесборника при вертикальной ориентации пылесоса пылесборником вверх. Последний момент позволяет предотвратить катастрофическую по последствиям ситуацию, когда пользователь при переноске хватается за заднюю часть робота, случайно нажимает при этом на фиксатор пылесборника и остается с пылесборником в руке и с разбитым пылесосом на полу.
Дополнительно периодически по мере необходимости нужно очищать главную щетку и удалять намотавшиеся на оси боковых щеток и колес нитки/волосы, очищать окошки датчиков и т. д. Для выполнения этих процедур можно воспользоваться прилагаемой щеточкой-скребком. Очистку главной щетки удобнее выполнять, вынув ее из отсека. Отметим, что вращается она на двух подшипниках: на бронзовом скольжения со стороны привода и качения на противоположном торце, помещенного в резиновую виброизолирующую втулку.

В режиме автоматической очистки грязь из пылесборника робота удаляется тем же путем, что и попадает, только в обратном направлении. Вероятно, в процессе такой самоочистки включается вращение основной щетки, а вентилятор в самом пылесосе выдувает воздух из пылесборника, но достоверно утверждать это мы не можем. Странно, но почему-то производитель не решился использовать решение с лючком сверху, которым была оборудована модель Navibot Silencio SR8895, правда, там подразумевалась только ручная очистка обычным пылесосом.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
- Auto — однократная уборка всей доступной площади.
- Spot — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
- Max — уборка всей доступной площади до тех пор, пока батарея почти не разрядится.
- Manual — ручное управление движением с помощью пульта ДУ. С пульта доступны команды поворот вправо-влево и движение вперед.
Дополнительно доступны опции Turbo — видимо, увеличение скорости вращения главной щетки и увеличение мощности всасывания, а также режим с включенным датчиком загрязнения (режим Dust Sensor).
Автоматический запуск уборки обеспечивают режимы запуска уборки в назначенное время и уборка по расписанию. Во втором случае, видимо, можно указать день/дни недели и время, когда нужно начинать уборку. Несмотря на то, что мы старались делать все по инструкции, однократную уборку мы запрограммировать смогли (при этом можно установить нужный режим — Auto или Max), но в случае расписания по дням недели у нас ничего не получилось.
Пространственное планирование уборки обеспечивается с помощью устройств-маяков Virtual guard, работающих от двух элементов питания типа D20 (LR20, «большой бочонок»). В данном случае это устройство может работать только в режиме виртуальной стены. В направлении от маяка создается виртуальная преграда, которую пылесос не пересекает. Направление этого барьера обозначено стрелкой на корпусе маяка, а длина, согласно инструкции, составляет не менее 2,5 м. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Включается и выключается устройство вручную кнопкой сверху.
Тестирование
Ниже представлены результаты тестирования по нашей методике:
| Режим | Время уборки*, мин:сек | Доля убранного мусора, %% |
| Auto | 16:58 | 91,1 |
| Auto+Turbo+Dust Sensor | 15:11 | 92,4 |
| Max (до разряда АКБ) + Dust Sensor | 66:25 | 94,8 |
| Max (до разряда АКБ) + Dust Sensor | 66:15 | 95,4 |
| Turbo + Dust Sensor, первые 10 мин. | 10:00 | 87,8 |
| Turbo + Dust Sensor, вторые 10 мин. | 10:00 | 95,6 (суммарный) |
| Turbo + Dust Sensor, третьи 10 мин. | 10:00 | 96,3 (суммарный) |
В режиме Auto территорию уборки робот сначала проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом, затем обходит по периметру, после чего возвращается на базу. В режиме Max (до разряда АКБ) сначала выполняется та же процедура, затем робот продолжает уборку, используя, кажется, другие алгоритмы движения, например, змейку на локальных участках перпендикулярную первоначальной.
Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Кстати, полная темнота не является для робота помехой, видимо, камера, направленная в потолок, выполняет вспомогательную функцию, и без ее данных робот вполне может обойтись, используя другие навигационные датчики, предположительно гироскоп и акселерометр. При боковом контакте с препятствием пылесос обычно совершает маневр объезда по дуге, стараясь держаться к препятствию как можно ближе. При обнаружении препятствия спереди робот разворачивается и начинает новое колено змейки. До физического контакта с препятствием, как правило, не доходит, так как робот определяет его наличие с помощью дистанционных ИК-датчиков, но темные препятствия робот этими датчиками не обнаруживает и упирается в них, пока, видимо, не срабатывают датчики перегрузки ведущих колес. Так робот без затруднений двигал по полу наше модельное препятствие в виде трехлитровой банки с водой в черном цилиндре, пока снизу по периметру мы не оклеили этот цилиндр белой малярной лентой. Иногда на вроде бы ровном месте пылесос совершает маневр объезда, предположительно в этих местах резиновый скребок, расположенный за главной щеткой, цепляется за небольшие неровности ковролина.
Узкий загончик (шириной на 5 см шире корпуса робота) не представлял для пылесоса особо сложной задачи — он часто в него заезжал, а, заехав, проводил в нем не очень много времени. Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз. Режим уборки — Auto с включенными опциями Turbo и Dust Sensor:
Режим уборки — Auto с включенной опцией Dust Sensor и с включенным режимом самоочистки:
В режиме с включенным датчиком загрязнения робот, определив участок с высоким содержанием грязи, включает турбо-режим и совершает пару кругов с небольшим радиусом на этом месте, после чего выключает турбо-режим и продолжает прерванное движение.
В турбо-режиме пылесос шумит гораздо сильнее, чем в обычном, но эффективность уборки, по крайней мере, нашего тестового мусора повышается незначительно (см. первые две строчки в таблице выше). Вообще, судя по типу собранного мусора и по характеру его расположения в пылесборнике (разумеется, у нас на полу тестового участка всегда присутствует небольшое количество обычного мусора — песок, волокна, волосы и т. д.) эффективность всасывания у данного пылесоса совсем небольшая, что позволяет считать его скорее электрическим веником, а не пылесосом как таковым. Видео выше демонстрирует, как робот после завершения уборки забирается на базу и как по окончании этого процесса выполняется перенос грязи из пылесборника робота в пылесборник базы. Самоочистка выполняется примерно за три минуты, и шумит при этом база как самый обычный и не очень тихий пылесос.
В нашем случае в большой пылесборник базы попадало примерно 70% от собранного риса и 30% оставалось в пылесборнике робота. Впрочем, производитель честно предупреждает, что тяжелый мусор может оставаться в контейнере робота-пылесоса. То есть в любом случае, при очистке большого контейнера лучше почистить и фильтры и пылесборник самого пылесоса.
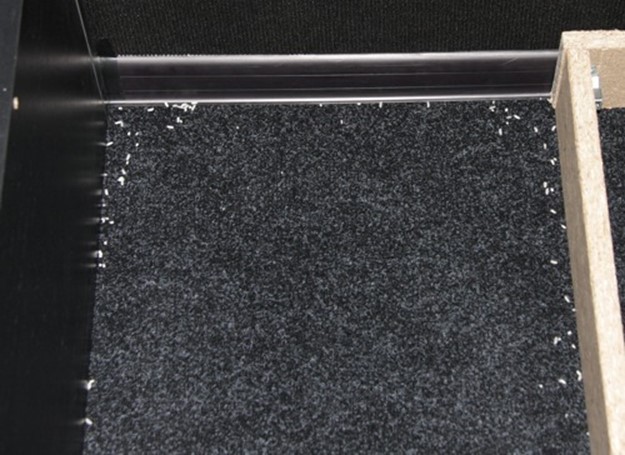
Вообще процент уборки относительно высокий. Даже в случае однократной уборки в режиме Auto робот оставляет совсем небольшие неубранные участки:

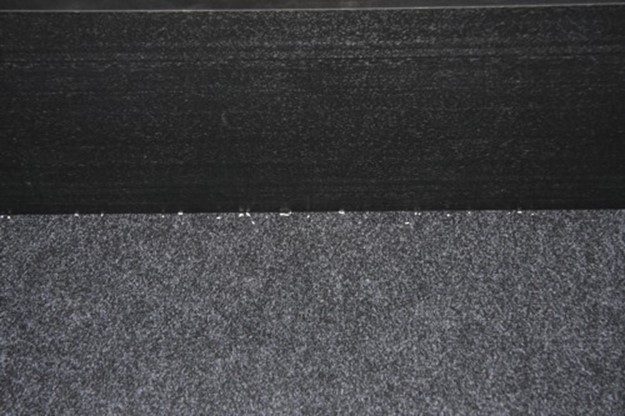
В случае уборки до разряда АКБ их практически нет:

Не считая участков вокруг базы и слишком близко к ней расположенного препятствия. Впрочем, несмотря на боковые щеточки, немного мусора остается в углах, куда щеточки все равно не дотягиваются, и вдоль стен, так как робот предпочитает объезжать препятствия на некотором расстоянии от них, и от светлых поверхностей он держится дальше, чем от темных:
С базой робот обращается не очень аккуратно. Такое впечатление, что обозначающие положение базы маячки или не работают, или отсутствуют, и робот запоминает местоположение базы на своей карте помещения. При этом привязка к реальному помещению иногда смещается и робот уверенно и очень упорно пытается чистить на месте фактического расположения базы. В результате чего робот толкает базу с одной стороны и почти на нее заезжает, а с другой стороны базы может оставлять неубранный участок пола в том месте, где он предполагает наличие базы. Впрочем, пусть не очень уверенно, но робот все равно сам заезжает на базу, даже если она сильно смещена им самим в процессе уборки.
В ручном режиме при управлении с пульта робот двигается и убирает только при нажатии на кнопку вперед, а при нажатии на кнопки вправо-влево выполняются повороты на месте в виде отдельных маневров. В итоге управлять пылесосом с пульта неудобно. При этом робот не принимает во внимание ни датчики препятствий, ни работающие виртуальные стены, ни сигналы базы — ручное управление имеет наивысший приоритет.
Дополнительно были проведены тесты с использованием Virtual guard в режиме виртуальной стены. Первоначально мы установили виртуальные стены слишком близко к базе, в результате робот, выполнив несколько движений, остановился с ошибкой навигации. На втором заходе мы переставили виртуальные стенки подальше от базы так, чтобы они отгородили угол тестовой площадки.
Все работает, как и ожидалось: виртуальный барьер робот не пересекает, само устройство робот обходит стороной.
В режиме локальной уборки робот убирает змейкой с прямыми углами.
Качество уборки в этом режиме не очень высокое, так как робот проходит участок змейкой только один раз.
Уровень шума мы измеряли в двух режимах:
| Режим | Уровень шума, дБА |
| Обычный | 55 |
| Turbo | 58,5 |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. В режиме обычной уборки пылесос Samsung NaviBot-S SR8980 можно считать довольно тихим устройством. Режим Turbo в ночное время лучше не включать, чтобы не беспокоить себя и соседей, тем более не факт, что в этом режиме качество уборки настолько же выше, насколько шумнее работает пылесос. Шум в режиме самоочистки на базе, как мы выше уже отмечали, сравним с шумом обычного пылесоса.
При зарядке пылесоса на базе потребление от электросети равно примерно 28 Вт в начале процесса, это значение снижается до 8,8 Вт перед завершением зарядки. Если пылесос включен и находится на базе, то от сети потребляется 8,5 Вт, что для режима фактического бездействия относительно много. Если пылесос убрать с базы (или выключить его кнопкой на днище), то потребление упадет до 2 Вт — столько потребляет сама база, включенная в сеть. В режиме самоочистки, когда работает пылесос в самой базе, потребление возрастает где-то до 430 Вт максимум. На полную зарядку аккумулятора пылесоса требуется примерно 3 часа. Аккумулятор без проблем может заменить пользователь самостоятельно, воспользовавшись обычной крестовой отверткой среднего размера:

Тестируемый пылесос в обычном режиме автономно убирает чуть больше часа, в режиме Turbo — минут на 10 меньше. Отметим, что это с аккумулятором, уже эксплуатировавшимся какое-то время. Кстати, если пылесосу на уборку всего помещения не хватит заряда аккумулятора, то робот вернется на базу, зарядит АКБ и затем продолжит уборку с того места, где он остановился.
Выводы
Робот-пылесос Samsung NaviBot-S SR8980 относится к классу роботов с продвинутой системой ориентации: он строит карту помещения и умеет прокладывать рациональный маршрут движения с минимальным повторным перекрытием траектории уборки. Отличает эту модель базовая станция с относительно большим по объему пылесборником, куда в автоматическом режиме может перемещаться собранный роботом мусор. В итоге робот может выполнять больше циклов уборки без обслуживания, что удобно для пользователя и экономит его, пользователя, время. Есть, правда, и побочные эффекты. Это, во-первых, в несколько раз увеличенные габариты базы; во-вторых, высокий уровень шума в режиме самоочистки; в-третьих, пусть и реже, но чистить придется не только робота, но и пылесборник базы с фильтрами.
Достоинства:
- Функция автоматического опустошения пылесборника робота
- Удобная для очистки конструкция базы
- Прокладка рационального маршрута
- Две боковые щетки
- Небольшая высота корпуса
- Удобный и «безопасный» пылесборник
- HEPA-фильтры в роботе и на базе
- Поддержка виртуальных стен
- Уборка в заданное время и уборка по расписанию
- Тихая работа в обычном режиме
Недостатки:
- Большие габариты базы
- Зафиксированный жестко скребок основной щетки может затруднять движение на некоторых участках пола
- Не самое высокое качество уборки впритык к препятствиям
- Робот может сдвигать базу в процессе уборки
Источник: ixbt.com





")








