Этот робот-пылесос компании Samsung традиционно имеет несколько названий: NaviBot S Pop-Out или SR10F71UB, он же VR10F71UCBC. Так же как и побывавший у нас на тестировании представитель этого класса бытовой техники данного производителя, робот NaviBot S Pop-Out имеет продвинутую систему ориентации, но, во-первых, оснащен выдвигающимися боковыми щеточками, и, во-вторых, работает он не под Windows CE 5.0, а под свободной Linux. Посмотрим, как эти два фактора способствуют повышению качества уборки.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и подруливающий ролик |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Емкость 0,3 л |
| Основная щетка | Одна с ворсом двух видов жесткости |
| Боковые щетки | Две на выдвыгающихся рычагах |
| Дополнительно | Скребок |
| Режимы очистки | Автоматический, локальный, интенсивный, ручной, по расписанию, ежедневная уборка. Модификаторы: турбо и определение загрязнения |
| Эффективность очистки | Нет данных |
| Уровень шума | 60 дБА |
| Датчики препятствий | Механический передний бампер, ИК-датчики препятствий и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы и определения виртуальных стен, потолочная видеокамера |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодный дисплей и звуковые сигналы |
| Время автономной работы | до 90 мин |
| Время зарядки | 180 мин |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Li-ion, 14,4 В, 31,68 Вт·ч |
| Потребляемая мощность | 40 Вт при зарядке батареи |
| Масса | 3,5 кг |
| Размеры (диаметр×высота) | 350×80 мм |
| Особенности | Выдвижные боковые щеточки, фильтр HEPA H11, создание карты (Visionary Plus) и выбор оптимального маршрута уборки, работа с маяками в режимах «виртуальная стена» |
| Комплект поставки* |
|
| Ссылка на сайт производителя | www.samsung.com/ru/ |
Внешний вид
Робот нам достался не новым, а бывшим в употреблении. Особенно пострадала коробка, из-за чего мы не приводим ее фотографию. В итоге пришлось потратить некоторое время на чистку пылесоса и проведение некоторых подготовительных операций, о которых будет рассказано ниже, но мы получили возможность оценить изменение внешнего вида после какого-то срока эксплуатации. В общем, несмотря на видимые царапины на виниловой пупырчатой вставке и на пластиковых окошках, робот выглядит более-менее опрятно.

Пылесос имеет классическую круглую в плане форму корпуса.

Края сверху и снизу скошены и сильно скруглены. Скос снизу поможет преодолевать препятствия, но скос сверху, возможно, будет способствовать тому, что пылесос чаще будет застревать под препятствиями с небольшим просветом.


Сверху корпус прикрыт панелью из прозрачного пластика, под которую помещена подложка с геометрическим узором. В оформление внесено разнообразие в виде боковых вставок из черного пластика и хромированной тонированной окантовки. Эти декоративные элементы обозначают места, за которые робота удобно брать при переноске двумя руками. Сверху в центре располагается контрольная панель с тремя сенсорными кнопками и многосегментным светодиодным индикатором.

В передней части верхней панели находится круговая направленная вверх видеокамера для ориентации по потолку, прикрытая, видимо, пластиковым окошечком, а перед ней — выпуклое окошечко с пимпочкой, прикрывающее, видимо, ИК-приемник сигналов с пульта ДУ и датчик определения виртуальных стен. В задней части сверху находится кнопка фиксации пылесборника. Сверху периметр передней половины корпуса прикрыт пупырчатой накладкой из ПВХ.

Ниже располагается вставка из зеркально-гладкого прозрачного для ИК-излучания пластика, и только затем корпус переходит в днище из черного пластика с матовой поверхностью. Совсем спереди находится узкий и короткий подпружиненный бампер с небольшим ходом, являющийся механическим датчиком препятствий. Окружность корпуса продолжают две вставки из черного пластика с окошками, за которыми возможно находятся очередные ИК-датчики, и завершает ее пристыкованный сзади пылесборник.

Перевернув пылесос вверх днищем, мы увидим две контактные площадки, подруливающий ролик, две боковые щетки на рычагах-шарнирах, крышку отсека аккумулятора, два ведущих колеса на подпружиненных рычагах, красную кнопку выключения за защитным силиконовым колпачком, желтый отсек с основной щеткой и дно пылесборника.

Есть как минимум три ИК-датчика перепада высоты (окошки на днище близко к краю — спереди и около боковых щеток), благодаря которым пылесос не падает со ступенек.
База, на которой пылесос подзаряжается, имеет встроенный блок питания, что придает ей дополнительный вес.

Длина кабеля питания составляет 160 см. Основание базы относительно большое и снизу на нем находятся две резиновые ножки и две резиновые площадки с пупырышками.

Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса. Сзади на корпусе базы есть ниша, куда можно намотать излишки кабеля питания.

Два светодиодных индикатора сигнализируют о наличии питания базы и о процессе зарядки пылесоса. Кармашка для пульта ДУ почему-то нет. Пульт относительно небольшой и кнопок на нем немного.

Обозначения кнопок читаются хорошо. Верхняя панель пульта изготовлена из черного маркого пластика с зеркально-гладкой поверхностью, но остальная часть — из более практичного матового черного пластика. К сожалению, пульт работает по ИК-каналу, поэтому для управления пылесосом он должен находиться в пределах прямой видимости и пульт нужно направлять примерно в переднюю часть пылесоса.
Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя, и внимательно его изучить. Правда, отметим, что у нас было руководство только на французском языке, а на момент написания статьи руководство на нескольких языках мы нашли только на итальянском сайте компании, но открыть его не получилось, из-за встроенной в файл защиты. Надеемся, что при начале продаж этой модели в России руководство на русском языке будет доступно всем желающим его прочитать.
Кинематическая схема «классическая»: оси ведущих колес расположены на одном диаметре окружности корпуса. Это и круглый корпус позволяют устройству совершать разворот на месте без изменения границ, занимаемой роботом площади. Указанная производителем скорость движения при уборке равна 32 см/сек. Наши измерения дали близкие к паспортным массогабаритные величины: ширина 349 мм, длина 350 мм, высота 81 мм, масса 3,4 кг. Отметим, что высота относительно небольшая, что увеличивает доступную для уборки площадь.
При уборке две передние щеточки подгребают мусор к центру, затем основная щетка перебрасывает его в пылесборник. Боковые щеточки закреплены на подвижных рычагах, что по идее должно улучшать качество сбора мусора в углах и других труднодоступных местах. Данная модель не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности пыль не засасывается. Примерная схема, представленная ниже, демонстрирует основной принцип сбора пыли:
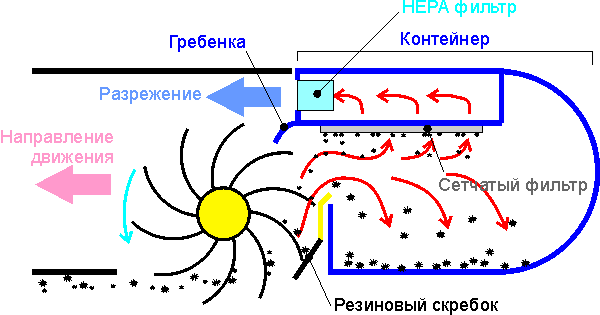
Тяжелые частицы забрасываются главной щеткой в отсек пылесборника, а легкие частицы засасываются в верхнюю часть пылесборника, где задерживаются грубым сетчатым фильтром, а особо мелкие пылинки отфильтровываются HEPA-фильтром. Дополнительно нитки и волокна снимаются с основной щетки гребенкой на пылесборнике.
Корпус пылесборника частично выполнен из прозрачного слегка тонированного пластика, что позволяет контролировать его наполнение, по крайней мере, пока его стенки не сильно загрязнены. Для очистки пылесборник нужно отсоединить от корпуса пылесоса, откинуть синюю крышку и вытряхнуть накопившуюся грязь, а лучше отсосать ее обычным пылесосом. Им же можно почистить HEPA- и сетчатый фильтры.

Есть три полезных особенности в конструкции пылесборника. Во-первых, пластиковая шторка не даст высыпаться грязи при переноски пылесборника, во-вторых, специальный толкатель не даст установить пылесборник без HEPA-фильтра, в-третьих, есть блокиратор, который предотвращает отсоединение пылесборника при вертикальной ориентации пылесоса пылесборником вверх. Последний момент позволяет предотвратить катастрофическую по последствиям ситуацию, когда пользователь при переноске хватается за заднюю часть робота, случайно нажимает при этом на фиксатор пылесборника и остается с пылесборником в руке и с разбитым пылесосом на полу.
Дополнительно периодически по мере необходимости нужно очищать главную щетку и удалять намотавшиеся на оси боковых щеток и колес нитки/волосы, очищать окошки датчиков и т.д. Для выполнения этих процедур можно воспользоваться прилагаемой щеточкой-скребком.

Очистку главной щетки удобнее выполнять, вынув ее из отсека.
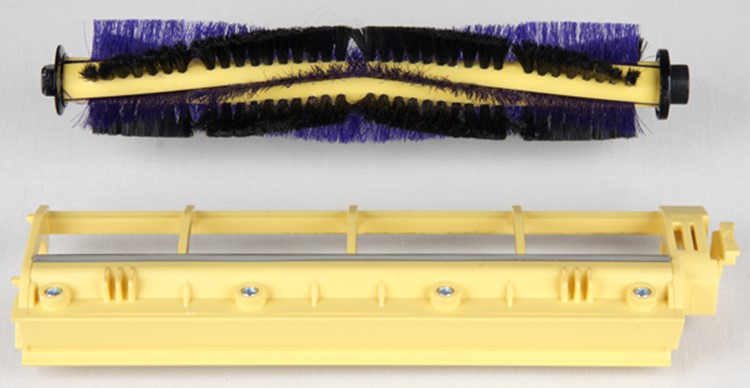
Отметим, что вращается она на двух подшипниках: на бронзовом скольжения со стороны привода и качения на противоположном торце.


При этом подшипник качения установлен в специальную вибро- и звукогасащую втулку из упругого пластика.
Боковые щеточки представляют собой просто длинные пучки ворса, выходящие из пластиковых бобышек. Гибких поводков, как это было в случае модели Samsung Navibot Silencio SR8895, почему-то нет. В итоге в доставленном нам на тестирование пылесосе, как уже отмечалось, бывшем в употреблении, боковые щеточки свернулись в компактную структуру, напоминавшую гнездо, и уже перестали выполнять свою функцию. Пришлось разглаживать щетину щеток под горячей водой, в результате щетки приобрели почти идеальную форму, что можно видеть на фотографии выше. По завершении тестирования щетки заметно разлохматились, хотя у нас был не самый сложный вариант покрытия — коммерческий ковролин с коротким петлеобразным ворсом.
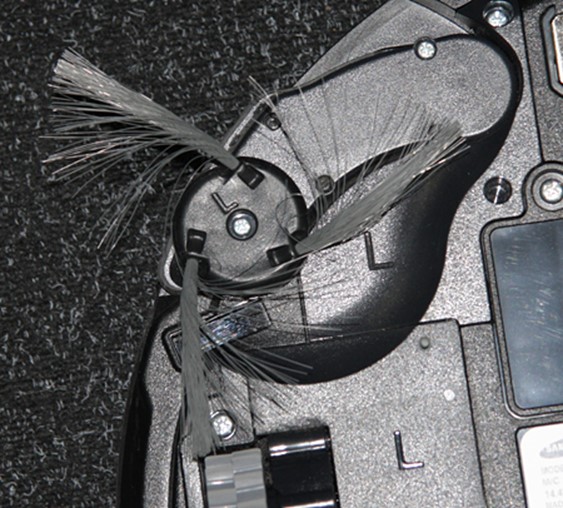
Конечно, их можно опять распрямить, что даст пользователю повод еще раз поухаживать за своим Любимым Пылесосом, но далеко не всем нужен очередной Тамагочи за пару десятков тысяч рублей. В общем, зря на поводках сэкономили.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
Автоматический — однократная уборка всей доступной площади.
Локальный — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
Интенсивный — уборка всей доступной площади до тех пор, пока батарея почти не разрядится.
Ручной — ручное управление движением с помощью пульта ДУ. С пульта доступны команды поворот вправо-влево и движение вперед.
Также доступны опции Турбо — видимо, увеличение скорости вращения главной щетки и увеличение мощности всасывания, — и включение датчика загрязнения.
Автоматический запуск уборки обеспечивают режимы запуска уборки в назначенное время и уборка по расписанию. Во втором случае, видимо, можно указать день/дни недели и время, когда нужно начинать уборку. Плохое знание французского языка не позволяет нам точно описать эти режимы.
Пространственное планирование уборки обеспечивается с помощью устройств-маяков Virtual Guard. В коробке с пылесосом мы обнаружили два таких устройства.

Маяк Virtual Guard работает от двух элементов питания типа D20 (LR20, «большой бочонок»). В данном случае Virtual Guard может работать в одном режиме — в режиме виртуальная стена. В направлении от маяка создается виртуальная преграда, которую пылесос не пересекает. Направление этого барьера обозначено стрелкой на корпусе маяка, а длина составляет не менее 2,5 м. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Включается и выключается эта «стена» вручную кнопкой сверху.
Тестирование
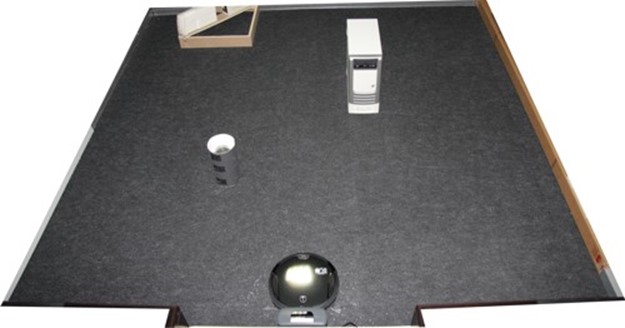
В режиме Автоматический территорию уборки робот проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом, после чего возвращается на базу. В режиме Интенсивный (до разряда АКБ) сначала выполняется та же процедура, затем робот продолжает уборку, используя другие алгоритмы движения, например, змейку на локальных участках перпендикулярную первоначальной. Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить.
При боковом контакте с препятствием пылесос обычно совершает маневр объезда по дуге, стараясь держаться к препятствию как можно ближе. При обнаружении препятствия спереди робот разворачивается и начинает новое колено змейки. До физического контакта с препятствием, как правило, не доходит, так как робот определяет его наличие с помощью дистанционных ИК-датчиков. Иногда на вроде бы ровном месте пылесос совершает маневр объезда, предположительно в этих местах резиновый скребок, расположенный за главной щеткой, цепляется за небольшие неровности ковролина. Пару раз между скребком и корпусом отсека главной щетки застревали рисовые зерна, скребок деформировался и мешал движению робота вперед. Судя по звуку, при движении к базе после завершения уборки робот оставляет включенным приводы главной щетки и вентилятора, но в обычном, не турбо режиме.
При движении вперед боковые щеточки прижаты к корпусу. При приближении к препятствию робот их выдвигает, что по идее способствует очистке в углах и других труднодоступных местах. При повороте робот втягивает щеточку в направлении поворота, но делает это не достаточно быстро, в результате выдвинутый рычаг щетки может задевать препятствие, робот прекращает маневр и начинает поворот в обратную сторону. Это маневрирование отнимает дополнительное время, а иногда в особо тесном окружении робот может застрять на несколько минут, пытаясь высвободить щетку, которая за что-то зацепилась.
К слову о тесноте, робот не очень любит заезжать в узкие и тесные места, поэтому в наш тестовый загончик, который на 50 мм шире ширины корпуса робота, в режиме быстрой уборки он, как правило, не заезжал, но в режиме работы до разряда АКБ, после перебора нескольких вариантов движений, загончик удостаивался чести быть убранным.
В турбо-режиме пылесос шумит гораздо сильнее, чем в обычном, но эффективность уборки, по крайней мере, нашего тестового мусора не повышается. Вообще, судя по типу собранного мусора и по характеру его расположения в пылесборнике (разумеется, у нас на полу тестового участка всегда присутствует небольшое количество обычного мусора — песок, волокна, волосы и т.д.) эффективность всасывания у данного пылесоса совсем небольшая, что позволяет считать его скорее электрическим веником, а не пылесосом как таковым.
В режиме с включенным датчиком загрязнения робот, определив участок с высоким содержанием грязи, включает турбо-режим и совершает пару кругов с небольшим радиусом на этом месте, после чего выключает турбо-режим и продолжает прерванное движение.
Правда, включение режима определения загрязненных участков не приводило к увеличению процента уборки, но, повторимся, это в случае нашего модельного мусора.
| Режим | Время уборки*, ММ:СС | % |
| Автоматический | 12:28 | 93,5 |
| Автоматический + Турбо | 12:47 | 92,8 |
| Автоматический + датчик загрязнения | 14:18 | 87,7 |
| Интенсивный (до разряда АКБ) | 64:30 | 95,5 |
| Интенсивный (до разряда АКБ) | 66:41 | 95,6 |
| *От начала уборки до заезда на базу. | ||
Вообще процент уборки относительно высокий. В случае однократной уборки робот оставляет небольшие неубранные участки. В случае уборки до разряда АКБ их практически нет:
Впрочем, несмотря на выдвижные боковые щеточки, немного мусора остается в углах, куда щеточки все равно не дотягиваются, и вдоль стен, так как робот предпочитает объезжать препятствия на некотором расстоянии от них, и от светлых поверхностей он держится дальше, чем от темных:

Кроме того, робот оставляет неубранным относительно большой участок около базы:

Зато за все время тестирования робот только один раз чуть-чуть сдвинул базу, но совсем чуть-чуть — эта оплошность не помешала ему заехать на базу по окончании уборки.
В ручном режиме при управлении с пульта робот двигается и убирает только при нажатии на кнопку вперед, а при нажатии на кнопки вправо-влево выполняются повороты на месте в виде отдельных маневров. В итоге управлять пылесосом с пульта муторно и неудобно. При этом робот не принимает во внимание ни датчики препятствий, ни сигналы базы. В итоге в ручном режиме можно со всей дури стукаться роботом о предметы мебели, толкать спящего кота (не проверяли) или передвигать трехлитровые банки с водой.
Дополнительно были проведены тесты с использованием Virtual Guard в режиме виртуальная стена, никаких особенностей, заслуживающих описания обнаружено не было: виртуальный барьер робот не пересекает, само устройство робот обходит стороной.
В режиме локальной уборки робот убирает по разворачивающейся змейке с прямыми углами.
Качество уборки в этом режиме не очень высокое, так как робот проходит участок змейкой только один раз. Ну и вообще, можно было сделать размер участка поменьше и заставлять робота возвращаться ровно на то место, откуда он был запущен, например, чтобы легко можно было повторить уборку.
| Режим | Уровень шума, дБА, (минимум/максимум) |
| Обычный режим | 50/55,2 |
| Турбо | 57,5/62,3 |
Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА. В режиме обычной уборки пылесос Samsung NaviBot S Pop-Out можно считать довольно тихим устройством. Режим турбо в ночное время лучше не включать, чтобы не беспокоить себя и соседей, тем более не факт, что в этом режиме качество уборки настолько же выше, насколько шумнее работает пылесос.
При зарядке пылесоса на базе потребление от электросети равно примерно 26 Вт. Если пылесос включен и находится на базе, то от сети потребляется 8,5 Вт, что для режима фактического бездействия относительно много. Если находящийся на базе пылесос выключить кнопкой на пульте, то потребление снизится до 6,6 Вт. Если пылесос убрать с базы (или выключить его кнопкой на днище), то потребление упадет до 1,7 Вт — столько потребляет сама база, включенная в сеть. На полную зарядку аккумулятора пылесоса требуется 2 ч 45 мин.
Аккумуляторную батарею для этого пылесоса можно будет купить в сервисном центре, там же можно и заменить, но при желании замену батареи можно осуществить самостоятельно, открутив крышку на днище.

Выводы
Робот-пылесос Samsung NaviBot S Pop-Out имеет продвинутую систему ориентации и умеет прокладывать рациональный маршрут движения с минимальным повторным перекрытием траектории уборки. Отличительными особенностями работа являются относительно небольшая высота корпуса и выдвижные боковые щеточки. Первое позволяет ему убирать под мебелью с низким просветом, второе улучшает качество уборки в углах и других труднодоступных местах. Тестирование показало, что качество уборки в целом довольно высокое, но робот старается по возможности не допускать физического контакта с препятствиями, что с одной стороны хорошо, с другой — некоторые труднодоступные участки и участки вдоль стен в результате такого деликатного поведения могут оставаться неубранными.
Достоинства:
- Прокладка рационального маршрута
- Две боковые выдвигающиеся щетки
- Небольшая высота корпуса
- Удобный и «безопасный» пылесборник
- HEPA-фильтр
- Работа с маяками в режимах «виртуальная стена»
- Уборка в заданное время и уборка по расписанию
- Устойчивая база
- Тихая работа в обычном режиме
Недостатки:
- Ворс боковых щеток легко деформируется, что снижает эффективность уборки
- Зафиксированный жестко скребок может затруднять движение на некоторых участках пола
- Не очень эффективный режим локальной уборки
- Неудобное управление в ручном режиме
Источник: ixbt.com





")








