Героем этой статьи из цикла, посвященного роботам-пылесосам, стала модель компании LG. Произносимая часть названия этого робота явно произошла от английского словосочетания «домашний робот» или Home roBot, а непроизносимую — VR5901LVM — пусть объясняет сама компания-производитель. Отметим, что, судя по информации, приведенной в руководстве пользователя, работает это устройство под управлением операционной системы Linux с ядром 2.6, там же перечислены еще ряд использованных программных продуктов с открытым исходным кодом.
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса, подруливающий ролик и два вспомогательных ролика |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Емкость 0,4 л, одно отделение |
| Основная щетка | Одна: ворс + упругие лепестки |
| Боковые щетки | Две |
| Дополнительно | Полировочная насадка из микрофибры и резиновый скребок |
| Режимы очистки | Зигзаг, расширенная, спиральная, ручная, отложенная уборка по таймеру |
| Эффективность очистки |
|
| Уровень шума | 60 дБ |
| Датчики препятствий | Ультразвуковой бампер, ИК-датчики перепада высоты |
| Датчики ориентации | ИК-датчик поиска базы, верхняя видеокамера, нижняя видеокамера, гироскоп |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодная индикация и голосовое оповещение |
| Время автономной работы | До 75 мин |
| Время зарядки | 3 часа |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Литий-полимерный аккумулятор, 14,8 В, 1900 мА·ч |
| Потребляемая мощность | 23 Вт при зарядке батареи |
| Масса | 3,2 кг |
| Размеры (диаметр×высота) | 360×90 мм |
| Особенности | Вертикальное извлечение пылесборника, фильтр HEPA 10, создание карты и выбор оптимального маршрута уборки |
| Комплект поставки* |
|
| Ссылка на сайт производителя | lg.com/ru/ |
Внешний вид

Пылесос имеет идеально круглую в плане форму корпуса.

Края сверху и снизу скошены и немного круглены.

Скос снизу поможет преодолевать препятствия, но скос сверху, возможно, будет способствовать тому, что пылесос чаще будет застревать под препятствиями с небольшим просветом. Сверху корпус прикрыт кольцевой панелью из пластика, который имеет серо-серебристое зеркально-гладкое покрытие, относительно устойчивое к появлению царапин. Внешний периметр этого кольца имеет окантовку из пластика с серебристым покрытием, ближе к центру располагается незамкнутая вставка из того же материала. Центральная часть верхней панели — это пластиковая крышка отсека пылесборника, откидывающаяся вперед и вверх. Эта крышка имеет относительно устойчивое к появлению царапин зеркально-гладкое черное покрытие с мелкими блестками. На задней части верхней панели располагаются три емкостные сенсорные кнопки, в передней — панель индикации, окно верхней видеокамеры и, видимо, ИК-датчики обнаружения зарядной базы и приема сигналов с пульта ДУ. По периметру корпуса идет вставка из зеркально-гладкого и черного с виду пластика.

В передней части можно увидеть пять отверстий-рупоров ультразвуковых датчиков препятствий и резиновую полоску-бампер, в задней — две решетки, через которые выдувается воздух.

Днище корпуса изготовлено из черного пластика с матовой поверхностью. Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, две боковые щетки, желтый отсек с основной щеткой, два ведущих колеса на подпружиненных рычагах, красную кнопку выключения, крышку отсека АКБ, два вспомогательных ролика и глазок нижней камеры с четырьмя светодиодами подсветки. В передней части днища ближе к краю расположены окошки ИК-датчиков перепада высоты.

База, на которой пылесос подзаряжается, имеет встроенный блок питания, что придает ей дополнительный вес.

Основание базы относительно большое, снизу на нем находятся три резиновые площадки. Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса.

Сзади на корпусе базы есть углубление с двумя зацепами, куда можно аккуратно уложить избыток кабеля питания (его длина составляет 150 см). К пылесосу прилагается небольшой ИК-пульт ДУ, не страдающий избытком кнопок.

Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя и внимательно его изучить.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ занимаемой роботом площади. Положительную роль также играют относительно небольшая высота, гладкий по периметру корпус и отсутствие выступающих сверху частей. В итоге пылесос отличается хорошей маневренностью и способностью проникать в тесные места с небольшим просветом. Указанная производителем скорость движения при уборке равна 350 мм/с. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 1 см.
Основная щетка расположена в передней части корпуса, поэтому пылесосу не нужно целиком проезжать через убираемую поверхность. При уборке две передние щеточки подгребают мусор из тех мест, по которым основная щетка не может пройти ввиду стерических затруднений. Примерная схема, представленная ниже, демонстрирует основной принцип сбора пыли:
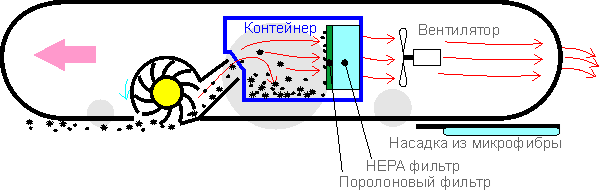
Частицы мусора забрасываются главной щеткой в пылесборник, при этом перемещать мусор помогает поток воздуха, создаваемый вентилятором пылесоса. На выходе пылесборника воздух фильтруется через сеточку, поролоновый фильтр грубой очистки и HEPA-фильтр тонкой очистки. В местах стыковки разъемных деталей пылесборника, а также HEPA-фильтра и воздуховодов с корпусом пылесборника размещены резиновые уплотнения, что уменьшает паразитный подсос воздуха. Для дополнительной очистки гладких полов на задней части днища можно закрепить специальную планку, на которую на липучке прикрепляется махровая насадка из микрофибры, начисто протирающая поверхность.

Для извлечения пылесборника нужно, нажав на ее край, открыть крышку сверху на корпусе пылесоса и потянуть пылесборник за откидывающуюся ручку.

Крышка пылесборника выполнена из прозрачного слегка тонированного пластика, поэтому количество собранного мусора можно оценить, даже не вынимая пылесборник из пылесоса. Желтая защелка надежно фиксирует крышку пылесборника, а входная щель закрыта откидывающейся шторкой, поэтому пыль вряд ли просыплется в процессе перемещения пылесборника до мусорного контейнера.

Мусор из пылесборника вытряхивается, при необходимости его внутренности и фильтры очищаются с помощью обычного пылесоса, а в случае сильного загрязнения все детали, включая фильтры, можно промыть водой (но перед использованием все промытое нужно тщательно высушить!). Дополнительно периодически по мере необходимости нужно очищать главную щетку и удалять намотавшиеся на оси боковых щеток и колес нитки/волосы. Для выполнения этих процедур можно воспользоваться прилагаемой щеточкой.

Также нам достался специальный инструмент с гребенками и лезвием для волокон, но входит ли он (как и две запасные боковые щеточки) в стандартный комплект поставки — нам неизвестно. Очистку главной щетки удобнее выполнять, вынув ее из отсека. Щетка очищается без каких-либо проблем, за исключением щелей между желтыми торцевыми заглушками и черным валом, куда, хотя и в небольшом количестве, наматываются волосы и тонкие волокна. Насадка из микрофибры стирается и сушится обычным образом. Завершает очистку пылесоса протирка корпуса с особым вниманием к окошкам ИК-датчиков, камер и к отверстиям ультразвуковых датчиков. Для восстановления формы ворса боковых щеточек их нужно намочить в горячей воде, расправить и дать высохнуть. Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями его в лучшем случае придется долго очищать от налипшего слоя пыли, а в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
Зигзагообразная — однократная уборка змейкой от препятствия до препятствия всей доступной площади.
Расширенная — пылесос делит помещение на несколько равных квадратов и осуществляет уборку змейкой в рамках каждого из квадратов.
Спиральная — интенсивная очистка определенного участка. В нужное место пылесос или просто переносится, или направляется в режиме ручного управления.
Ручная — ручное управление движением с помощью пульта ДУ. С пульта доступны команды поворота вправо-влево (на месте) и движения вперед-назад. Отметим, что в этом режиме пылесос движется только тогда, когда нажата одна из кнопок направления — это не всегда удобно.
Автоматический запуск режима уборки обеспечивает задержка по таймеру от 1 до 12 часов с шагом в 1 час.
О своем состоянии — текущий режим уборки, уровень заряда и т.д. — пылесос информирует с помощью светодиодного индикатора с оранжевым свечением. Кроме того, о переходах между некоторыми состояниями — начало уборки, завершение уборки, начало поиска зарядной базы, старт зарядки и окончание зарядки — пылесос сообщает, проговаривая соответствующую фразу женским голосом. Отключить это голосовое оповещение, к сожалению, нельзя.
Тестирование
Ниже представлены результаты тестирования по нашей методике:
| Режим | Время уборки*, мин:сек | % |
| Зигзагообразная | 11:40 | 82,7 |
| Зигзагообразная | 6:10 | 77,1 |
| Зигзагообразная | 6:53 | 75,2 |
| Расширенная | 6:54 | 71,4 |
| Расширенная | 6:51 | 73,4 |
| Расширенная | 8:33 | 74,3 |
| Зигзагообразная с повторами | 5:30 | 79,8 |
| Зигзагообразная первый повтор | 5:38 | 89,9 (суммарно) |
| Зигзагообразная второй повтор | 6:20 | 93,4 (суммарно) |
| Зигзагообразная до разряда АКБ | 77:хх | 96,7 |
| *От начала уборки до заезда на базу. | ||
Видео ниже снято с одной точки с максимально возможным в наших условиях охватом убираемой территории. База находится внизу по центру, при обработке видеоряд ускорен в пять раз.
Режим Зигзагообразная:
Режим Расширенная:
Проведенные тесты позволяют сделать некоторые предварительные выводы. В режиме Зигзагообразнаятерриторию уборки робот однократно проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным способом. В режиме Расширенная траектория несколько более запутанная, но тенденция к движению змейкой прослеживается. Робот определенно строит и использует карту убираемой поверхности, это видно по маршруту движения — он по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Несмотря на наличие двух видеокамер и, видимо, гироскопического датчика, робот иногда терял ориентацию, что как минимум приводило к увеличению времени уборки с 5:30-6:30 до 8 и более минут. Потеряв ориентацию, робот пытается ее восстановить, обходя доступную территорию по периметру, при этом он довольно настойчиво стремится проехать в тех местах, где мог проезжать раньше (как он, видимо, считает). Иногда при этом на его пути оказывается зарядная база, которую он не определяет, если она повернута боком к передней части пылесоса. В итоге пару раз пылесос смещал базу с ее первоначального положения, а один раз вообще развернул ее фронтальной частью к стенке огороженного участка, после чего, разумеется, не смог на нее заехать. Также случалось, что на базу пылесос не мог заехать с первой попытки — тогда он отъезжал от базы на некоторое расстояние и пытался заехать на нее второй раз, в крайнем случае процесс успешно завершался после третьей попытки. Робот, как правило, заезжает в узкий загончик и часто проезжает практически впритык к стенкам. Впрочем, между высокими вертикальными стенками и корпусом робота обычно остается зазор порядка 1 см, тогда как к низким или наклонным стенкам (например, к плинтусу) робот подъезжает вплоть до физического контакта.
Режим Зигзагообразная (при обработке часть видеоряда ускорена в пять раз):
Особого улучшения качества уборки при выборе режима Расширенная мы не обнаружили (см. таблицу выше). Визуально после уборки в режиме Расширенная неубранных участков обнаруживалось обычно больше, чем в режиме Зигзагообразная. Для примера приведем две фотографии — после уборки в режиме Зигзагообразная:
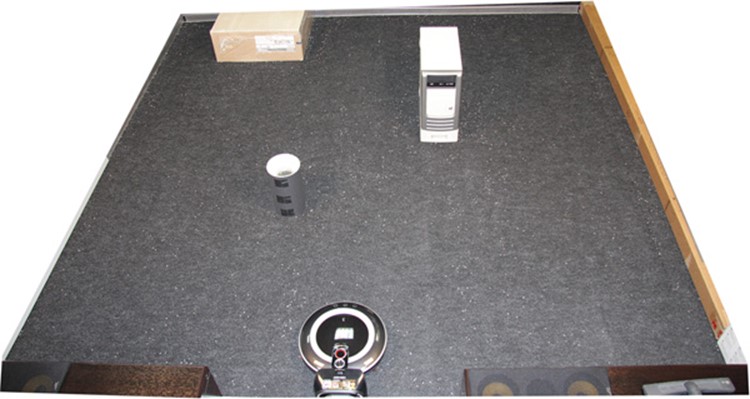
и после Расширенная:

Возможно, такое различие в режимах обусловлено небольшими размерами нашего тестового участка.
К сожалению, режима автоматической уборки до полного истощения АКБ нет, как нет и уборки по расписанию, поэтому повторную уборку нужно запускать вручную. Повторные запуски на уже убранной территории показали некоторый прирост суммарного процента убранного мусора (см. таблицу выше). Многократные запуски уборки в режиме Зигзагообразная вплоть до разряда АКБ (до того момента, когда робот сообщил о разряде батареи; перед тестом батарея была полностью заряжена) позволили достичь высокого процента сбора мусора (см. таблицу выше), при этом робот проработал даже чуть больше, чем заявлено в паспортных характеристиках. Фотографии ниже показывают участки, где робот не смог убрать даже после многократных прохождений:


В основном неубранными остались небольшие участки в углах, которые в принципе не захватываются ни основной, ни боковыми щеточками, а также участки впритык к высоким вертикальным стенкам, от которых робот держится на небольшом удалении.
В режиме Спиральная робот убирает по разворачивающейся спирали, как это демонстрирует видео ниже (при обработке часть видеоряда ускорена в пять раз):
Отклонения от спиралеобразного движения вызваны объездом препятствий и, возможно, навигационными ошибками или дополнительными заложенными в алгоритм движениями. В этом режиме робот убирает в круге диаметром порядка 2 м, что демонстрируют две фотографии ниже — до и после уборки в режиме Спиральная:

До уборки в режиме Спиральная

После уборки в режиме Спиральная
Во всех режимах робот шумит одинаково — впрочем, шум было удобнее измерять в режиме Спиральнаяуборка, в котором робот дольше движется вблизи микрофона:
| Режим | Уровень шума, дБА, среднее (минимум/максимум) |
| Спиральная | 52,7 (50,5/53,5) |
Робот можно считать очень тихим, и если бы не голосовое оповещение (впрочем, не очень громкое), то его вполне можно было бы запускать в ночное время — если не в помещении, в котором спят хозяева, то в соседней комнате. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
При начале зарядки пылесоса на базе потребление от электросети равно 23 Вт. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 3,0 Вт, с периодическим кратковременным подъемом до 6,5 Вт в моменты подзарядки батареи. Если пылесос убрать с базы (или выключить его кнопкой на днище), то потребление упадет до 1 Вт — столько потребляет сама база, включенная в сеть.
Выводы
В обоих режимах автоматической уборки робот-пылесос LG Hom-Bot VR5901LVM убирает доступную ему территорию по возможности с минимальным количеством повторных прохождений. Помогает ему в этом продвинутая система ориентации. В принципе, робот может хорошо убирать на свободной площади и впритык к препятствиям, но не за один, а за несколько циклов уборки. Это совсем некритично в случае ежедневной уборки относительно чистых помещений, но для тщательной уборки особо грязного помещения придется вручную запускать цикл уборки несколько раз.
Достоинства:
- Система ориентации и прокладка рационального маршрута
- Удобное извлечение пылесборника
- Невысокий идеально круглый корпус без выступающих частей
- Нет механического бампера
- Две боковые щетки
- HEPA-фильтр
- Возможность установки насадки из микрофибры
- Уборка через заданное время
- Устойчивая база
- Голосовое оповещение
- Тихая работа
Недостатки:
- ИК-, а не радиочастотный пульт ДУ
- Отсутствует режим уборки до разряда аккумулятора
- При потере ориентации может сдвинуть зарядную базу
Источник: ixbt.com





")








