
Робот-пылесос Xrobot Helper
Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система |
Два ведущих колеса и опорный поворотный ролик |
| Способ сбора пыли |
Инерционное перемещение и вакуумная фильтрация |
| Пылесборник |
0,35 л, два отделения, встроенный отделяемый вентилятор |
| Основная щетка |
Две: с резиновыми лопастями и с ворсом |
| Боковые щетки |
Одна |
| Дополнительно |
Резиновые скребки (2 шт.), протирочная насадка из микрофибры |
| Режимы очистки |
Обычный до разряда аккумулятора, непрерывная работа с промежуточной подзарядкой, локальная очистка, ручное управление, две ступени скорости, уборка по расписанию |
| Уровень шума |
55 дБ |
| Датчики препятствий |
Контактные и ИК-датчики препятствий на бампере и ИК-датчики перепада высоты |
| Датчики ориентации |
ИК-датчик поиска базы и определения виртуальных стен, датчик вращения опорного ролика, датчики вращения ведущих колес |
| Управление на корпусе |
Сенсорные кнопки |
| Дистанционное управление |
Радиочастотный (2,4 ГГц) пульт ДУ |
| Оповещение |
Светодиодная индикация, звуковые сигналы и ЖК-дисплей на пульте ДУ |
| Время автономной работы |
90 мин |
| Время зарядки |
3-4 часа |
| Способ зарядки |
На зарядной базе с автоматическим возвратом или напрямую от блока питания |
| Источник питания |
Аккумулятор Ni-MH 14,4 В, 2200 мА·ч |
| Мощность |
24 Вт |
| Масса |
3,3 кг |
| Размеры (диаметр×высота) |
∅32×9 см |
| Комплект поставки |
|
Внешний вид и функционирование
Робот-пылесос Xrobot Helper упакован в картонную коробку с сине-белым оформлением.

Коробка имеет типичные для подобных устройств габариты. Она оснащена пластиковой ручкой, поэтому донести покупку до дома будет нетрудно. Нам досталась универсальная коробка на несколько моделей, на ее боковой грани было отмечено, что внутри находится именно Helper. В комплект поставки входят почти все необходимые для работы робота аксессуары, и только элементы питания типа AAA для пульта ДУ и AA для виртуальной стены придется докупать.

Запасные части и расходные материалы в комплекте поставки представлены сменным фильтром, боковой щеточкой и двумя салфетками (видимо, из микроволокна) для протирки пола. Еще есть комбинированная щетка-гребенка, которую можно использовать для чистки пылесборника, самого робота и основной щетки в частности. Руководство пользователя представляет собой брошюру из нескольких страниц. Руководство, разумеется, на русском языке. Качество текста и полиграфического исполнения достаточно высокое.
Корпус робота изготовлен из пластика. Днище — светло-серый пластик с матовой поверхностью и без покрытия, выше — пластик с черным зеркально-гладким покрытием, относительно устойчивым к появлению царапин. Центральная часть верхней панели покрыта прозрачным лаком (или пленкой), который защищает красно-черный рисунок. Робот сверху и с боков темный, что затрудняет поиск робота в темных закоулках квартиры, когда он по какой-то причине не вернется на базу, также робота сложнее заметить боковым зрением, когда он путается под ногами, а значит, с большей вероятностью на него можно наступить. На верхней панели ближе к передней части есть три сенсорные кнопки, обозначенные белыми подписями и контурами. В зависимости от состояния активированного робота одна или все три кнопки подсвечиваются синим.

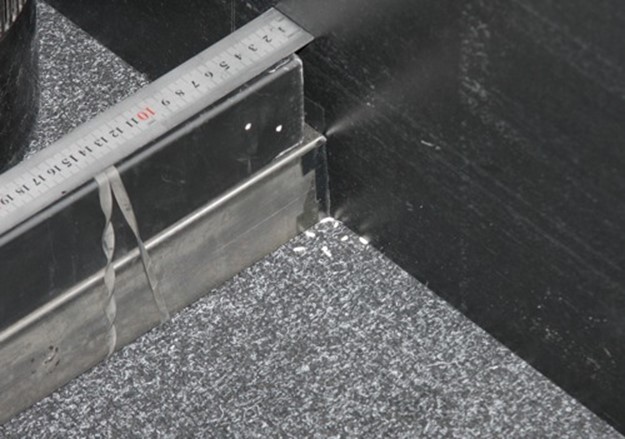
Яркость подсветки умеренная, поверхность бликует, поэтому на ярком свету не всегда удается сразу рассмотреть, что же там за состояние. Дополнительно о своем состоянии робот информирует с помощью коротких и относительно громких звуковых сигналов. Отключить звуковое оповещение нельзя. Пылесос имеет почти идеально круглую форму диаметром 321 мм (здесь и далее по тексту приведены результаты наших измерений). Высота до вершины кругового приемника спереди равна 100 мм. Края снизу скошены, что помогает роботу преодолевать препятствия, а некоторая угловатость при переходе от верхней панели к боковой поверхности снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.

Масса робота равна 3,36 кг. Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играет гладкий по периметру корпус. Ведущие колеса диаметром 68 мм оснащены цепкими резиновыми покрышками с выраженными грунтозацепами. Колеса установлены на подпружиненных шарнирах, имеющих ход в 25,5 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса огибает накладка из мягкой резины.

За выступами сверху и снизу находятся датчики столкновения, а за окошками из тонированного пластика — ИК-датчики обнаружения препятствий. Точно по центру спереди расположены подпружиненные контакты, обеспечивающие зарядку на базе. Выше — датчик парковки на базу. Датчик обнаружения базовой станции и виртуальной стены расположен под цилиндрическим элементом, обеспечивающим круговой обзор. Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота.

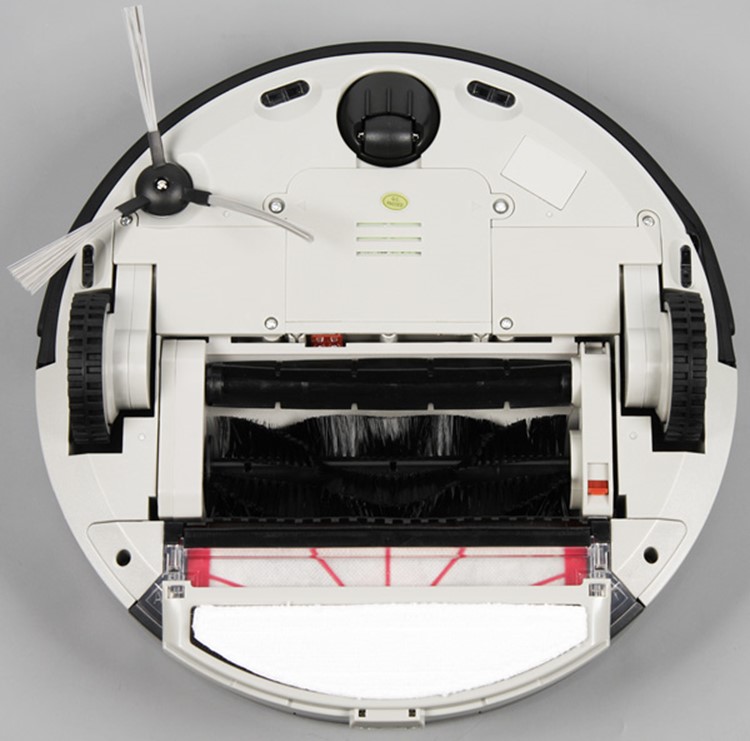
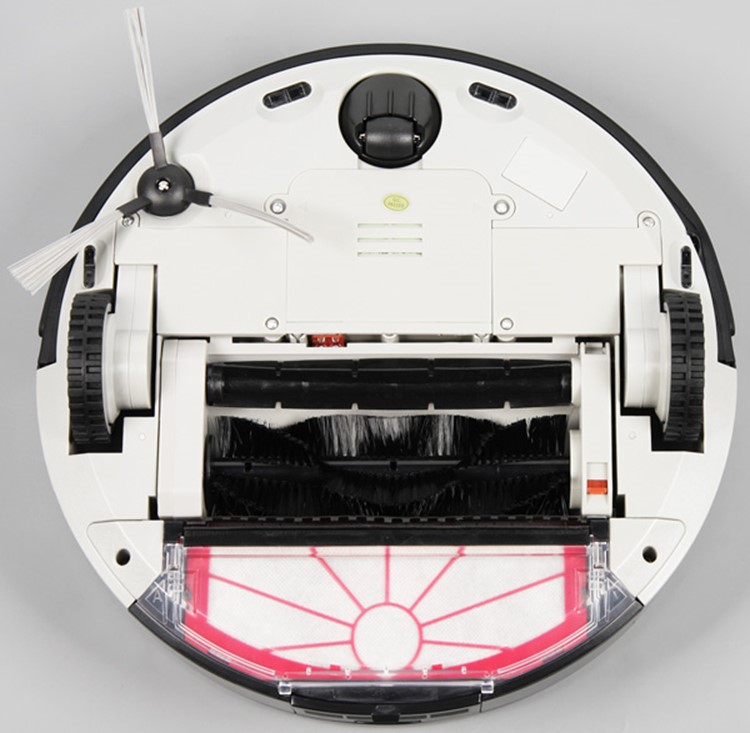
Днище пылесборника выполнено из прозрачного пластика, но особой пользы это не приносит, так как через него видно только нижний отсек, да и взглянуть на него можно только или перевернув пылесос днищем вверх или вынув пылесборник. Очищать пылесборник очень просто и удобно, так как днище и шторка откидываются на большой угол, открывая фильтр и основной отсек для мусора.

Воздушный вентилятор встроен в пылесборник, но модуль с вентилятором легко отсоединяется, поэтому сам корпус пылесборника можно мыть под водой. Отсоединять пылесборник от пылесоса относительно удобно и после некоторой тренировки это можно делать одной рукой, не сдвигая припаркованный на базе пылесос. Выдувается воздух через решетку на задней стенке вентиляторного модуля.
Боковая щеточка имеет длинную и относительно жесткую щетину, пучки которой выходят из упругих поводков. Напомним, что потерявшую форму боковую щеточку можно выправить, разгладив пучки щетины под горячей водой и высушив щеточку до установки на место. К оси привода щеточка крепится с помощью самореза с головкой под крестовую отвертку.
Отсек, в котором находятся основные щетки, закреплен на шарнире, поэтому с ходом примерно в 6-7 мм он следует рельефу пола. Щетка-скребок выступает за боковые направляющие примерно на 1-2 мм, а щетина второй щетки выступает на 4 мм. В итоге достигается хорошая эффективность работы щеток на неровных поверхностях с практически любым типом покрытия. Для очистки щетки вынимаются из отсека. Щетина на большой щетке мягкая, а ее пучки идут волнами, что уменьшает звук от вращения щетки в контакте с полом. Стальные оси в торцах щеток вращаются в подшипниках скольжения в виде бронзовой втулки. Это правильное конструктивное решение, так как подшипники качения в этом узле рано или поздно заклинивает, из-за намотавшихся на сепаратор волос, шерсти и прочего. Подшипники установлены во втулки из мягкой резины, что снижает вибрацию и шум.

Отметим, что редукторы приводов основных щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щетки.
При уборке передняя боковая щетка подгребает мусор к центру. Затем резиновая щетка-скребок перемещает крупный мусор, а вторая щетка с щетиной подхватывает крупный и мелкий мусор и перебрасывает его в верхний отсек пылесборника. При этом зубчики на кромке заслонки пылесборника способствуют высвобождению мусора из щетинок щетки. Во второй фазе оставшийся на полу мелкий мусор засасывается через щель между двумя резиновыми скребками в нижний отсек пылесборника, где задерживается сменным воздушным фильтром. Можно считать, что данное устройство является пылесосом в классическом смысле, так как какая-то часть пыли засасывается непосредственно с очищаемой поверхности.
В качестве завершающего этапа робот может выполнять протирку гладких полов, для чего на дно пылесборника нужно закрепить поддон, а на него на липучке небольшую махровую салфетку.
На правом боку находится разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от цепей робота.

В данном роботе установлена Ni-MH аккумуляторная батарея на 14,4 В, 2200 мА·ч. Батарейный блок составлен из восьми цилиндрических элементов типоразмера SC.

На днище расположены передний опорный поворотный ролик, боковая щеточка, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером расположены четыре ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.
База, на которой пылесос подзаряжается, имеет внешний блок питания (длина кабеля — 188 см), который также можно использовать для зарядки робота, минуя базу, если по какой-то причине она недоступна.

Основание базы относительно большое, на него снизу наклеены три противоскользящие резиновые накладки.

Сзади на корпусе базы есть углубление и пазы для намотки избытка кабеля питания.

К пылесосу прилагается относительно большой радиочастотный пульт ДУ круглой формы.

На пульте есть кнопки из резиноподобного материала с читаемыми контрастными обозначениями и ЖК-дисплей, работающий на отражение. Дисплей достаточно информативный — выводится текущее время и день недели, время автоматического запуска и выбранные дни недели, режим работы, а при передаче сигнала мигает значок антенны.
Робот-пылесос Xrobot Helper имеет три основных режима уборки:
Auto — автоматическая уборка всей доступной площади до разряда аккумулятора.
Spot — интенсивная очистка определенного участка. В нужное место пылесос переносится или направляется пользователем в режиме ручного управления.
Ручной — ручное управление движением с помощью пульта ДУ. С пульта доступны команды поворот вправо-влево и движение вперед-назад.
Для всех режимов доступен выбор скорости движения — быстро или помедленнее. Для автоматического режима дополнительно можно включить опцию повтора — возобновление уборки после цикла зарядки на базовой станции. Есть режим запуска уборки по расписанию — можно указать день/дни недели и время, когда нужно начинать уборку.
Пространственно организовать уборку поможет виртуальная стена — специальное устройство, входящее в комплект поставки.

Это устройство работает от двух элементов питания типа АА. В направлении (куда смотрит прорезь) от виртуальной стены создается невидимая преграда, которую пылесос не пересекает. С помощью такой преграды можно отгородить места, где выполнять уборку нежелательно. Включается и выключается устройство кнопкой спереди.
Отметим, что для совместной работы пульта ДУ, зарядной базы и виртуальной стены с конкретным экземпляром робота необходимо, чтобы они были синхронизированы. Как выполняется синхронизация описано в руководстве, но, скорее всего, делать этого не придется. В нашем случае нужно было провести синхронизацию только базы.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Цикл первый — уборка на нормальной скорости.
|
Режим |
Общее время уборки, мин. |
% |
|
Первые 10 мин. |
10 |
80,8 |
|
Вторые 10 мин. |
20 |
88,3 (суммарный) |
|
Третьи 10 мин. |
30 |
90,5 (суммарный) |
|
Далее до разряда аккумулятора |
98 |
97,0 (суммарный) |
Второй цикл тестов — уборка на низкой скорости.
|
Режим |
Общее время уборки, мин. |
% |
|
Первые 10 мин. |
10 |
55,0 |
|
Вторые 10 мин. |
20 |
83,2 (суммарный) |
|
Третьи 10 мин. |
30 |
85,4 (суммарный) |
|
Далее до разряда аккумулятора |
116 |
97,1 (суммарный) |
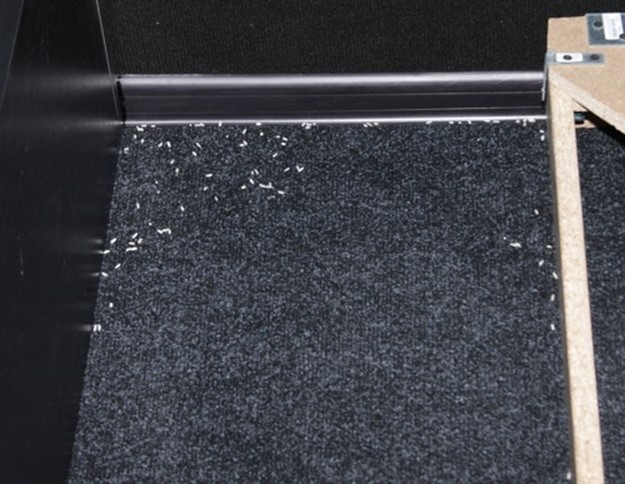
Качество уборки хорошее, но не выдающееся. Там, где робот проезжает, риса остается мало, но вот особенности навигации и нашего тестового помещения оказывают отрицательное влияние на степень и скорость обработки площади пола, в принципе доступной роботу. Через 30 минут работы с нормальной скоростью движения мусора остается не очень много, в основном в загончике. Видно, что робот по какой-то причине уделяет больше внимания правой стороне помещения:
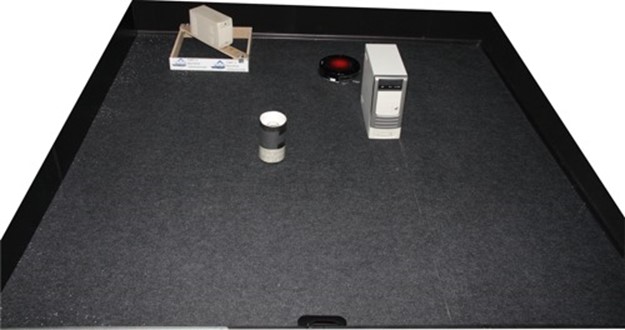
Уборка в тестовом помещении до разряда аккумулятора показала, что робот способен убрать почти весь мусор на доступной ему территории.
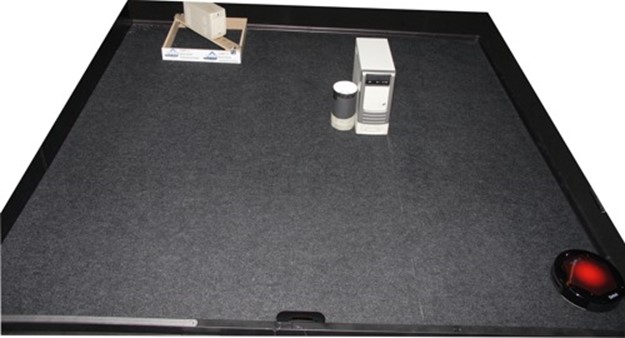
Около базы чисто, чуть-чуть риса осталось в углах и больше в загончике:

Конечный итог уборки на низкой скорости такой же, но за первые 10-20-30 минут робот собирает риса меньше. Зачем вообще нужен такой режим — непонятно, разве что шум на низкой скорости чуть-чуть ниже. С базой робот обращается не очень аккуратно, может ее толкнуть и сдвинуть, но и убирает около нее хорошо, и при этом все равно успешно на базу паркуется. По команде на парковку от пользователя или почти полностью разрядив аккумулятор, робот выключает вентилятор и, видимо, основную щетку, немного снижает скорость движения и начинает искать базу. Паркуется робот достаточно уверенно, и в наших тестах всегда с первого раза.
Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается небольшой зазор, тогда как к низким, наклонным (например, к плинтусу) или черным в ИК-свете стенкам робот подъезжает вплоть до срабатывания механических датчиков в бампере. Датчики на бампере расположены двумя горизонтальными рядами, один над другим, поэтому препятствия выше или ниже рядов робот не определяет, и может упорно пытаться их сдвинуть, что видно на видео выше, когда робот сталкивается с наклонным плинтусом. Это отнимает драгоценное время и заряд аккумулятора. Загон шире робота на 5 см, но боковые стенки загона робот определяет ИК-датчиками с некоторой дистанции, поэтому старается в загон не забираться, и только к концу уборки робот с большой вероятностью в загон все же заезжает, возможно это связано со снижением напряжения на аккумуляторе и уменьшением чувствительности датчиков. Согласно нашим тестам на восстановление заряда роботу требуется провести на базе примерно 3 ч 13 мин. Во время зарядки от сети потребляется до 19 Вт. 3,3 Вт потребляется с роботом на базе в режиме ожидания и 0,7 Вт потребляет база без робота.
В режиме локальной уборки робот движется странно, каким-то непонятным зигзагом:
Виртуальная стена на свежих элементах питания создает преграду длиной минимум 3 м. Робот большую часть времени старается не пересекать эту преграду, но, бывает, выполняет какой-то хитрый маневр, и оказывается по другую сторону.
Тяга к базе, когда робот возвращается для зарядки, имеет приоритет перед виртуальной стеной. Указанные особенности следует иметь ввиду, при использовании робота.
При работе с низкой скоростью движения уровень шума чуть ниже:
|
Режим |
Уровень шума, дБА |
|
Нормальная скорость |
58 |
|
Низкая скорость |
57 |
Относительно других роботов-пылесосов Xrobot Helper средний по громкости. Характер издаваемого им шума также средний по степени вызываемого у пользователя раздражения. В общем, находиться в одной комнате с работающим роботом не очень комфортно, но терпимо. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
Робот-пылесос Xrobot Helper за счет использования бесконтактных датчиков препятствий и мягкого резинового бампера сводит до минимума вероятность нанести мебели какие-либо повреждения. В автоматическом режиме Xrobot Helper убирает до разряда аккумулятора и сам возвращается на базу для подзарядки. Пользователь может вручную управлять движением робота, включать режим интенсивной очистки локального участка и запрограммировать его на уборку в заданное время по выбранным дням недели.
Достоинства:
-
Модульная конструкция пылесборника
-
Возможность установки протирочной насадки с салфеткой из микроволокна
-
Уборка по расписанию
-
Ограничение движения с помощью виртуальной стены
-
Радиочастотный пульт ДУ
-
Удобное управление в ручном режиме
-
Хорошая комплектация
Недостатки:
-
Странная траектория в режиме локальной уборки
-
Может преодолевать барьер виртуальной стены
Источник: ixbt.com





")








