Первый робот-пылесос под маркой Xiaomi появился в 2016 году. Модель Xiaomi Mi Robot Vacuum получилась вполне удачной, а в свете сравнительно невысокой цены быстро завоевала статус хита продаж. Кроме цены успеху способствовали хорошо себя зарекомендовавшие конструктивные решения, которые китайцы позаимствовали у лучших представителей рынка роботов-пылесосов.

Уже успела появиться вторая версия робота-пылесоса от Xiaomi – Roborock Sweep One (обзор), но первая модель обещает еще долго оставаться в производстве, поскольку не конкурирует с новинкой по цене.
А пока давайте взглянем, что же из себя представляет Mi Vacuum Cleaner:
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса, один опорный поворотный ролик |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Одно отделение |
| Основная щетка | Одна: лепестково-щетинистая |
| Боковые щетки | Одна |
| Дополнительно | Упругий неподвижный скребок |
| Режимы очистки | Автоматический с возвратом для подзарядки, локальный, по расписанию |
| Эффективность очистки | До 250 м² на одном заряде |
| Уровень шума | Нет данных |
| Датчики препятствий | Сканирующий лазерный дальномер инфракрасного диапазона (лидар), механический передний/боковой бампер, фронтальный ультразвуковой датчик, ИК-датчики перепада высоты, боковой ИК-датчик |
| Датчики ориентации | Лидар, одометр, гироскоп, акселерометр, электронный компас |
| Управление на корпусе | Механические кнопки |
| Дистанционное управление | С мобильного устройства по Сети |
| Оповещение | Светодиодные индикаторы состояния, голосовое оповещение |
| Время автономной работы | До 2,5 часов в стандартном режиме |
| Время зарядки | Нет данных |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Литий-ионный аккумулятор, 14,4 В, 5200 мА·ч, 74,88 Вт·ч |
| Потребляемая мощность | 55 Вт |
| Масса | 3,8 кг |
| Размеры (диаметр×высота) | ∅345×96 мм |
| Особенности | Создание карты и выбор оптимального маршрута уборки, магнитный ограничитель движения |
| Комплект поставки* |
|
| Ссылка на сайт производителя | www.mi.com |
| Заявленная цена на сайте производителя | 1699 юаней (примерно $250) |
Внешний вид
Разработчики Xiaomi Mi Robot Vacuum без особого стеснения заимствовали конструкции узлов и принципы работы у роботов-пылесосов, давно присутствующих на рынке. Донорами как минимум послужили модели Roomba (см., например, статью про iRobot Roomba 980) и Neato (см., например, статью про Neato Botvac Connected). Конечно, есть, как нам кажется, и оригинальные решения.

Пылесос в плане имеет практически идеально круглую форму.

Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху и слегка выраженный бортик на бампере снижают вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.

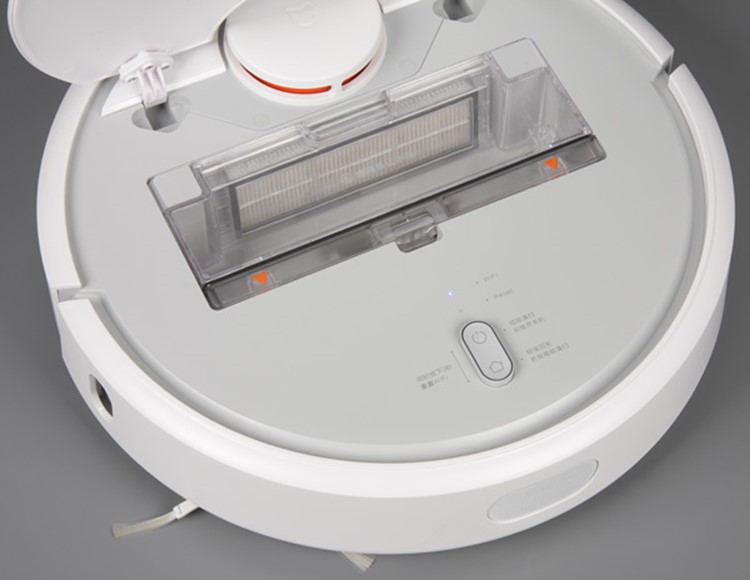
Корпус изготовлен из белого пластика с матовой поверхностью без покрытия. С одной стороны это хорошо, так как светлый робот заметен в темноте и на темном полу, поэтому его проще находить, например, под диваном, когда он там застрянет, и на робота с меньшей вероятностью будут случайно наступать, с другой — белое матовое днище легко пачкается и сложно очищается. Верхняя поверхность крышки, закрывающей большую часть верхней панели, тоже белая, но зеркально-гладкая. В передней части располагается контрольная панель с механической кнопкой-качалкой, ободок которой подсвечивается белым, оранжевым или красным, статично или с определенной динамикой в зависимости от текущего состояния, синим индикатором состояния подключения по Wi-Fi и крохотной кнопкой сброса. Когда верхняя крышка закрыта, то доступной остается только кнопка-качалка.

Ручки для переноски робота нет. Верхняя крышка прикрывает не только часть контрольной панели, но и отсек пылесборника.
Спереди установлен механический бампер, который закрывает всю переднюю часть робота и заходит на бока.

За решеткой по центру бампера находится ультразвуковой датчик приближения к препятствию. На правом боку бампера есть овальный вырез, за которым расположен вспомогательный ИК-датчик препятствий, помогающий роботу двигаться вплотную к препятствию (заявлено, что на расстоянии 10 мм), по возможности без физического контакта с ним.

В задней части корпуса находятся «выхлопная» решетка (правая) и решетка (левая) за которой находится, видимо, громкоговоритель, а по центру — контактные площадки для зарядки на базе.

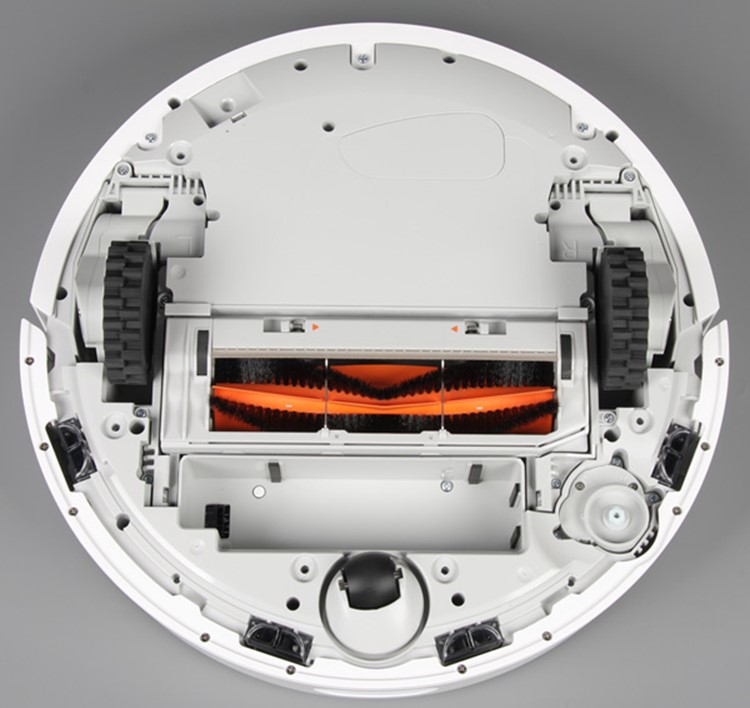
Перевернув пылесос вверх днищем, мы увидим четыре ИК-датчика перепада высоты (темные окошки по краю спереди и перед ведущими колесами), ролик на вращающейся платформе, боковую щетку, отсек с основной щеткой, закрытый рамкой с ограничительными направляющими (уголки ковров не наматываются) и с дополнительным упругим неподвижным скребком, и два ведущих колеса на подпружиненных рычагах. Неприметная крышечка скрывает разъем Micro-USB, используемый, видимо, для диагностики и контактного способа обновления прошивки.

База относительно большая и не очень легкая.

Корпус базы изготовлен из белого пластика в основном с матовой поверхностью. На днище базы наклеены две резиновые противоскользящие площадки.

Площадь днища увеличена за счет поддерживающей выступающей вперед юбки. В итоге база стоит довольно устойчиво и может быть установлена на полу без какой-либо дополнительной поддержки. На передней панели базы — большое окошко из тонированного полупрозрачного пластика, за которым находятся пассивные маячки парковки (чередующиеся полоски из поглощающего и отражающего материала). Ниже — длинные подпружиненные контактные площадки.

Такая конструкция гарантирует надежный контакт робота с базой даже при слегка кривоватой парковке. При нажатии контактные площадки не только утапливаются, но и смещаются вбок, что способствует очистке контактирующих поверхностей. Блок питания встроен в базу. Сетевой кабель питания отсоединяемый (используется двухштырьковый разъем с цилиндрическими контактами). Излишки кабеля питания укладываются в специальный канал сзади на базе.

И для красоты и чтобы меньше пылилось все это закрывается крышкой.

Измеренная длина сетевого шнура составила 1,5 м (длина гибкой части). Паспортные характеристики базы: вход — 100-240 В 50/60 Гц, выход — 20 В постоянного тока до 2,2 А.
Дополнительных аксессуаров и расходных материалов в комплекте поставки нет, все по минимуму.

Есть документация — напечатанное руководство и краткая справка, все, к сожалению, на китайском языке. Упакован пылесос в не очень большую скромно оформленную коробку с пластиковой ручкой.

Функционирование
Тем, кто знает китайский, рекомендуем прочитать о функциях пылесоса в прилагаемом руководстве пользователя. Тем, кто не знает — придется или искать перевод руководства (мы не нашли) или переводить самостоятельно, например с помощью мобильного приложения.
Робот оснащен системой ориентации, основой которой является сканирующий лазерный дальномер инфракрасного диапазона (лидар). Лидар установлен в башенке на верхней панели. Через горизонтальные «бойницы» этой башенки можно разглядеть объективы излучающего лазерного диода и фотоприемника. Лазерный диод и фотоприемник установлены на роторе, который вращается в горизонтальной плоскости, и именно это позволяет роботу получать данные о расстоянии до препятствий с обзором в 360 градусов по горизонтали 5 раз за секунду. Производитель также указывает, что частота сканирования составляет 1800 отсчетов в секунду, расстояние до препятствия определяется на дистанции до 6 м с точностью до 2%. То есть, в отличие от большинства моделей, робот не обязательно должен подъезжать к препятствию вплотную, чтобы определить его наличие. Кроме того, дистанционное определение препятствий и их геометрии позволяет роботу составлять карту помещения и отслеживать свое собственное местоположение. Робот «знает», где он находится, где находится базовая станция (при запуске с нее), где он уже убрал, где нужно убрать и где в периметре территории еще остаются неисследованные участки.
По идее, меняющаяся обстановка — перемещение предметов мебели или расхаживающие люди и не люди — может сбивать ориентирование робота, но на практике ходить вокруг робота не возбраняется, видимо, есть какой-то алгоритм отбрасывания непостоянных во времени преград. Также нужно учитывать то, что лидар работает в плоскости на определенной высоте от пола, то есть все, что ниже или выше, робот «не видит». Впрочем, на случай «ниже» робот оснащен механическим бампером и УЗ-датчиком препятствий на нем. Вариант препятствий, находящихся выше плоскости действия лидара, в теории может приводить к некоторым проблемам, так как крыша башенки находится над этой плоскостью. Отметим, что высота робота даже с башенкой не очень большая (у нас получилось 81 мм до верхней точки бампера и 95 мм до верха башенки), что увеличивает доступную для уборки площадь.
Оси ведущих колес расположены на одном диаметре (350 мм) окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (70 мм), а ход шарниров в точке центров колес достигает почти 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Эти колеса имеют глубокий протектор из нескользящего резиноподобного материала. Потенциально робот способен преодолевать препятствия высотой где-то до 18 мм — примерно такое расстояние от пола до нижней точки бампера пылесоса, что согласуется с проходимостью, то есть робот не будет пытаться залезть на то, на чем с большой вероятностью застрянет. Весит робот 3,8 кг.
При уборке передняя боковая щеточка подгребает мусор к центру. Отметим конструкцию боковой щеточки — гибкие упругие поводки (для прочности прошитые на концах) заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает эффективно и не теряет свою форму. Оригинальным элементом является небольшой пучок щетины на боковой поверхности втулки щетки, видимо, это должно предотвращать наматывание волос, ниток и т.д. на ось щеточки.

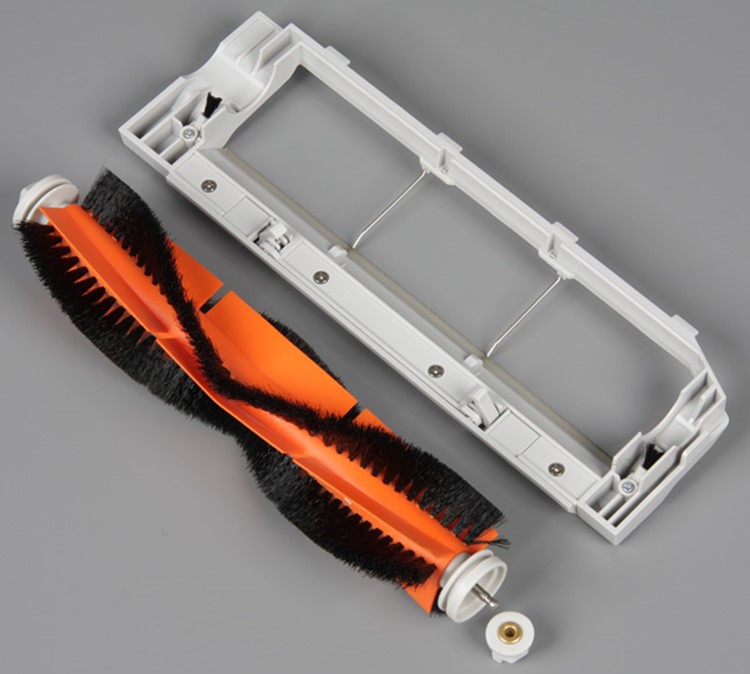
Основная щетка должна справляться с задачей вычесывания и подбрасывания мусора с убираемой поверхности. Далее мусор потоком воздуха засасывается в емкость пылесборника, где он, мусор, задерживается фильтром. Пройдя через вентилятор, воздух, выполнивший свою задачу носителя, выбрасывается назад через решетку в задней части робота. Данная модель не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности мусор почти не засасывается (разве что очень легкая пыль).
Торец основной щетки вращается в подшипнике скольжения, защищенным от попадания в него волос и грязи пластиковым кожухом. Отметим, все те же пучки щетины на рамке, которые призваны ограждать привод и подшипник щетки от попадания в них мусора.
В комплект поставки входит специальный инструмент с гребенкой и лезвием в загогулине. С его помощью можно срезать намотавшиеся волосы и вычесывать щетку.

Отсек, в котором установлена основная щетка, закреплен на рычажках, поэтому с ходом примерно в 9 мм у удаленного от осей рычагов края он следует рельефу пола, что увеличивает эффективность очистки.

Корпус пылесборника изготовлен из прозрачного пластика. Однако крышка верхней панели непрозрачная, поэтому, не приподняв ее, невозможно оценить фактическое заполнение пылесборника. Датчика переполнения пылесборника, видимо, нет, объем пылесборника относительно небольшой, поэтому пользователю придется часто заглядывать под крышку. Спереди у пылесборника есть крышка, которую нужно откинуть при очистке этой емкости. Задний торец пылесборника заглушен воздушным фильтром. Для исключения паразитного подсоса воздуха стыки патрубка и пылесборника, а также фильтра и всасывающей решетки оснащены упругими уплотнителями. Судя по перечеркнутой капельке, пылесборник запрещено мыть.
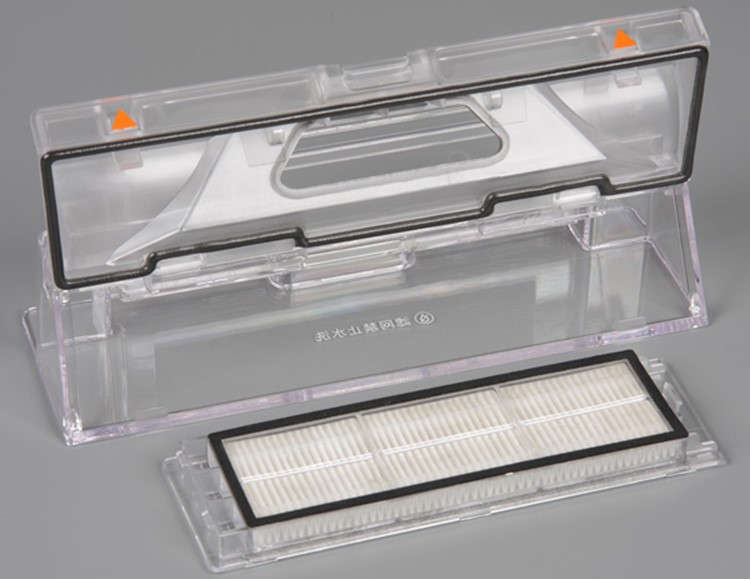
Робот отслеживает наличие пылесборника в своем отсеке, вернее фильтра на нем, для чего на рамке фильтра закреплен небольшой магнитик, а в отсеке имеется соответствующий датчик. Складчатый мелкопористый фильтр защищает крупноячеистая сеточка из пластика, задерживающая крупный мусор. Без этой сеточки складки подобных фильтров забиваются мусором, который трудно оттуда вычищать.
Производитель хвастается установленным в роботе мощным вентилятором с бесколлекторным мотором японской компании Nidec. Заявлено, что пиковая производительность вентилятора достигает 0,67 м³/мин, а максимальное разряжение составляет 1800 Па.
Мощному вентилятору соответствует емкая аккумуляторная батарея. Чтобы добраться до нее, нужно выкрутить шесть винтов на днище, один из которых под пломбой, и снять его.
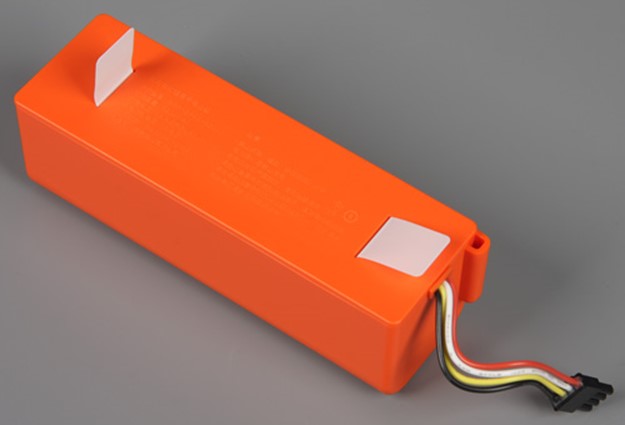
Скорее всего, батарейный блок составлен из цилиндрических элементов популярного типоразмера 18650, но разбирать батарею мы не стали, так как с виду нет возможности сделать это без существенного ущерба для внешнего вида. Снятое днище демонстрирует, что модули ведущих колес, основной и боковой щеток при необходимости легко заменяются.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, а в худшем случае пылесос может выйти из строя.
Насколько мы смогли понять, эта модель имеет два основных режима уборки:
- Однократная (двукратная для малых помещений) уборка всей доступной площади.
- Очистка определенного места — в нужное место пылесос переносится.
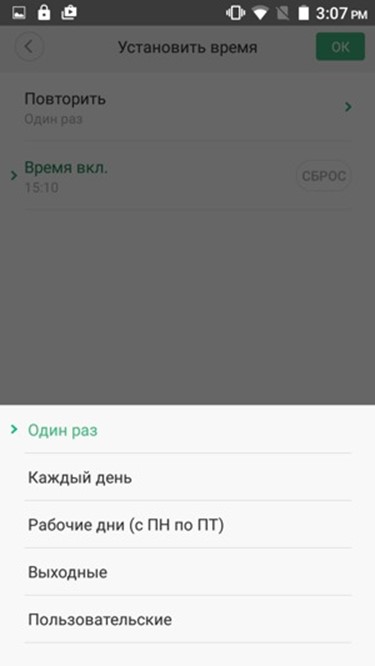
Автоматический запуск уборки обеспечивает режим работы по расписанию — в приложении можно указать день/дни недели и время, когда нужно начинать уборку.
Как пишет производитель, при запуске с базы робот будет убирать или пока не уберет всю доступную площадь, или до снижения заряда батареи ниже, чем 20%. Во втором случае, он вернется на базу, зарядит аккумулятор, затем продолжит уборку с того места, где закончил. Сколько циклов уборки с промежуточными подзарядками сможет сделать робот не уточняется.
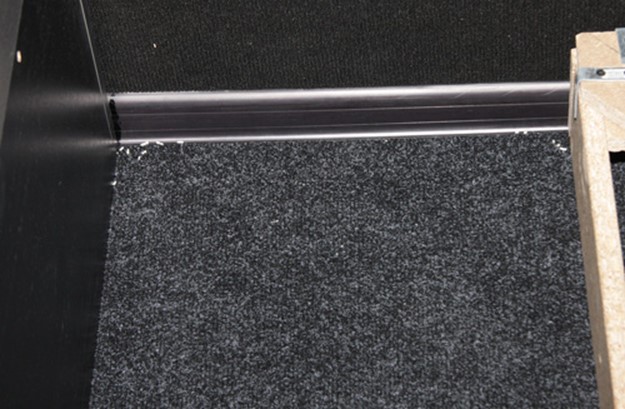
Пространственное планирование уборки обеспечивается с помощью ограничительной магнитной ленты (шириной 25 мм и толщиной в 2 мм), которую можно просто положить на пол или спрятать под (наверное, все же тонким) напольным покрытием. К сожалению, производитель поскупился вложить ленту в комплект поставки, покупать ее придется дополнительно, и, к примеру, Gearbest.com предлагает Original Xiaomi Virtual Wall длиной, видимо, в 2 м за $16,63 с бесплатной доставкой.

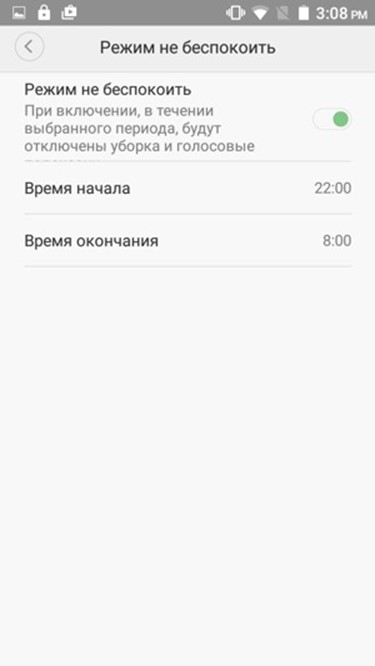
О своем состоянии пылесос информирует с помощью светодиодного индикатора — ободка вокруг кнопки-качалки, — а также проговаривая слова, фразы и даже длинные предложения на чистом китайском языке. При желании это голосовое оповещение можно отключить, но только вместе с возможностью запуска на уборку.
Данная опция, как и многие другие функции доступны из фирменного приложения, устанавливаемого на мобильные устройства с Android (видимо, и iOS) на борту. Официальной русской версии приложения нет, но при желании можно найти и поставить из APK-файла неофициальную переведенную на русский язык версию (правда, придется еще немного повозиться для того, чтобы также установить переведенный на русский плагин, предназначенный для управления роботом-пылесосом). Большинство снимков с экрана, приведенных тут, сделаны именно для такой русифицированной версии приложения и плагина.
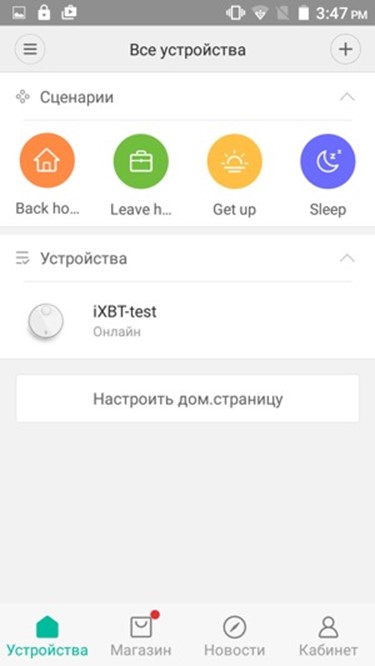
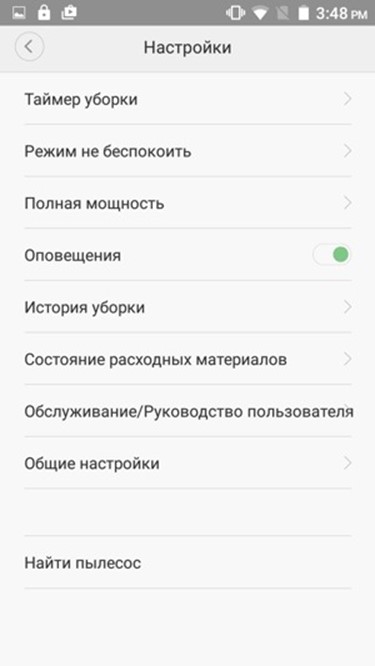
Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (и, видимо, только 2,4 ГГц) с выходом в большую Сеть, так как для управления роботом привлекается глобальный облачный сервис. С одной стороны, это хорошо, так как контролировать робота можно отовсюду, где есть подключение к Сети, с другой — плохо, так как если нет доступа в Сеть или нет хотя бы связи с облачным сервисом (а это случается постоянно), то нет и доступа к роботу, даже если он и мобильное устройство находятся в одной локальной сети. С нашей точки зрения, самая полезная функция — это отображение карты помещения, составленной роботом, и траектории движения робота на ней. Можно контролировать, как робот убирает, и при необходимости вносить коррективы в расстановку мебели и т. д. с целью повышения качества уборки. На главной страницы плагина отображается состояние робота, карта, убранная площадь и время для последней выполненной уборки, а также текущий заряд батареи. Внизу есть кнопочки возврата на базу, запуска уборки и переключения мощности вентилятора.

Вверху справа — кнопочка перехода на страницы с дополнительными настройками.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
| Мощность вентилятора | Запуск | Время уборки, мин:сек | % |
| Максимум* | 1 | 16:37 | 98,0 |
| Максимум* | 2 | 15:51 | 98,9 (суммарный) |
| Максимум* | 3 | 14:18 | 99,1 (суммарный) |
| Бесшумно | 1 | 15:43 | 90,8 |
| Бесшумно | 2 | 16:47 | 99,2 (суммарный) |
* Дополнительно включена опция Полная мощность.
Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, режим Максимум с включенной опцией Полная мощность:
В случае нашего тестового участка в начале уборки робот обходит по периметру доступную для уборки площадь, а затем, двигаясь змейкой, проходит внутреннюю часть территории. Робот выполнял эти процедуры дважды, что, по всей видимости, и предполагается делать для небольших по площади помещений. Построенная карта и траектория движения приведены ниже.

Зеленая точка — место нахождения робота и зарядной базы. Робот без проблем заезжает в узкие места, которые шире корпуса робота всего на 50 мм, и убирает там. При фронтальном приближении к препятствию, робот за несколько сантиметров до него замедляет скорость, но обычно продолжает двигать вплоть до касания бампером и срабатывания датчиков перемещения бампера. Если преграда легко сдвигается, например, занавеска, робот ее отодвигает на несколько сантиметров (датчики бампера не срабатывают), но потом все равно от преграды отворачивает. Во время движения вдоль препятствия, хорошо отражающего ИК-свет, робот движется впритык боком к препятствию, но не касается его. А если препятствие плохо отражает ИК-свет, то происходит периодическое касание боковой частью бампера. Во время обхода по периметру или вдоль препятствия робот увеличивает скорость вращения боковой щеточки. На видео и на карте видно, что навигационная система робота часто дает сбой, и робот странно объезжает два нижних угла. С чем это связано, мы даже предположить не можем. Иногда обход змейкой становился диагональным относительно стен огороженного участка, это видно на видео ниже (режим Бесшумно, первый проход):
Почему-то это сказывалось не только на виде траектории, но и на качестве уборки, так как робот за первый проход оставил уголок неубранным, что видно на карте:

Такое поведение с диагональным обходом повторялось до тех пор, пока мы не сняли робота с базы и не вернули его обратно, тем самым, видимо, сбросив его привязку с известному помещению. С базой робот обращается очень аккуратно, он убирает впритык к ней, но не касается и не сдвигает базу с места. По завершении уборки робот переводит всасывающий вентилятор и приводы щеток в режим низкой мощности, затем быстро, целенаправленно и по возможности кратчайшим путем движется к месту перед базой, разворачивается на некотором расстоянии от нее задней частью с контактами к базе, медленно к ней приближается и, выполняя колебательные движения, неторопливо пристыковывается. Грубое определение местоположения базы выполняется, видимо, по составленной карте, но точная стыковка производится с использованием пассивных маячков на самой базе. Робот умеет искать базу по команде пользователя, даже если он был запущен не с нее.
В целом, робот убирает быстро и качественно. Включение режима с низкой мощностью вентилятора Бесшумно почти не сказывается на качестве уборки (больше повлиял неубранный уголок), по крайней мере, нашего тестового мусора. После первого цикла уборки немного мусора остается около препятствий и на небольших участках в углах, где навигация дает сбой, около базы робот убирает очень хорошо:
Еще через два цикла мусора остается очень и очень мало (убрано 99,1%):


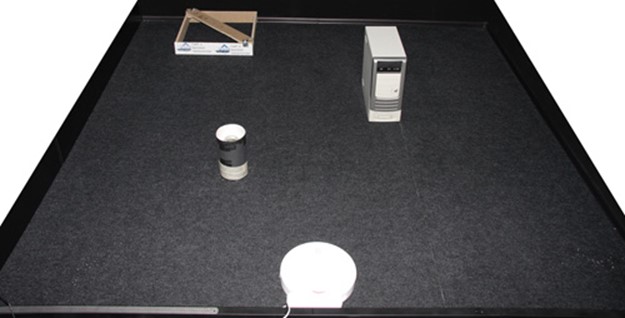
В первом в тесте локальной уборки из-за черных и почти не отражающих стен робот потерял ориентацию. Две коробки помогли ему сохранять привязку к местности, и уборка успешно завершилась. Процесс показан на видео ниже:
Согласно руководству размер убираемой зоны равен 1,5 на 1,5 м, примерно так и получилось. В качестве магнитного ограничителя работает магнитная полоска-вкладыш от уплотнителя дверцы холодильника, но какая именно нужна ориентация намагниченности и играет ли она роль, мы не выясняли.
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 110 м². Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты и красным кружком отмечено расположение базы.
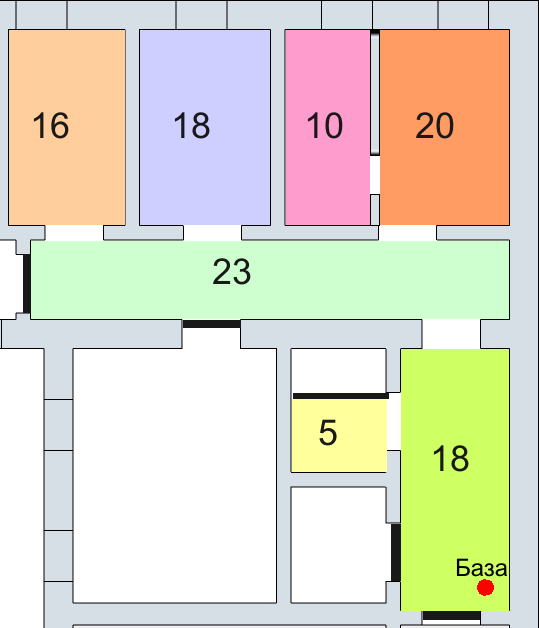
Робот змейкой убрал всю доступную площадь. По завершении робот целенаправленно и кратчайшим путем вернулся на базу для подзарядки. На карте ниже можно увидеть как робот убирал и путь из последней комнаты на базу:

Убирал робот 93 минуты. В случае такого большого помещения робот разбивает его на участки размером примерно 3,5 на 3,5 м, повторяя в каждом один и тот же цикл — обход участка по периметру, затем змейкой обход внутренней площади участка и переход к следующему участку. Как и все побывавшие у нас на тестировании роботы с навигацией Xiaomi Mi Robot Vacuum не оперирует такими понятиями как комната и стены, с его точки зрения есть какая-то доступная площадь и препятствия на ней, как робот обойдет эту площадь определяется порядком обнаружения препятствий и алгоритмом уборки, на реальные комнаты робот площадь не делит. По данным из приложения, убранная площадь составила 84 м², но напомним, что из указанных нами 110 м² нужно вычесть значительную площадь, занимаемую мебелью и оборудованием. По данным из приложения, работ закончил с уборкой с зарядом на уровне 38%, но из-за проблем с обновлением информации эти данные могут быть недостоверными. Так в дополнительных тестах на той же мощности вентилятора робот от полного заряда до уровня в 19% (напомним, что при уровне ниже 20% робот перестает убирать и возвращается на базу) проработал 103 минуты. То есть на одном заряде в режиме максимальной мощности робот убирает на площади примерно в 120 м². С учетом одной подзарядки (а в явном виде нигде не сказано, сколько раз робот может подзаряжаться и самостоятельно возобновлять уборку) в этом режиме робот может убрать до 240 м². В режиме с пониженной мощностью вентилятора максимальная площадь, соответственно, увеличивается.
По окончании уборки в офисе почти весь мусор скопился на складчатом фильтре.

Проще всего, с нашей точки зрения, очищать пылесборник и фильтр с помощью обычного пылесоса с щелевой насадкой. Впрочем, это замечание относится ко всем роботам-пылесосам. Боковая щеточка нечего на себя не намотала, а на основную щетку немного волос намоталось и на щетинках стали образовываться колтуны из пыли.

Однако щетка от волос легко очистилась пальцами, использовать резак на гребенке не потребовалось. Некоторые опасения вызывает количество мусора, забившегося в щель между приводом и втулкой. Видимо, для продления срока службы щеточного узла это место нужно чистить тщательно и регулярно.

Уровень шума зависит от выбранного режима:
| Режим | Уровень шума, дБА |
| Бесшумно | 54,0 |
| Средняя | 57,0 |
| Максимум | 59,0 |
| Максимум + Полная мощность | 61,5 |
Если сравнивать с другими, то в зависимости от режима робот Xiaomi Mi Robot Vacuum меняется от тихого до умеренно громкого робота-пылесоса. Характер шума несильно раздражает, однако находиться в одной комнате с работающим роботом не комфортно, особенно, если он работает в режиме средней и максимальной мощности вентилятора.
При зарядке пылесоса на базе потребление от электросети составляет до 37 Вт в начале процесса. Если пылесос включен и находится на базе, то от сети потребляется примерно 2,4-3,3 Вт (Wi-Fi включен). Если пылесос убрать с базы, то потребление упадет до 0,3 Вт — столько потребляет сама база, включенная в сеть. На полную зарядку (вернее, от 20% до 100%) аккумулятора требуется примерно 2 часа 30 минут.
Выводы
Этот китайский робот-пылесос оснащен системой продвинутой ориентации, основанной на самом надежном способе — на дистанционном определении препятствий и их конфигурации с помощью сканирующего лазерного дальномера. Робот получил емкую литий-ионную батарею, мощный вентилятор и поддержку удаленного контроля и управления с помощью мобильного приложения, имеющего среди прочего функцию визуализации построенной карты помещения и траектории движения робота. На основании результатов проведенных нами тестов мы можем предположить, что программное обеспечение робота еще может быть улучшено, так как робот в некоторых ситуациях ведет себя странно, что увеличивает время уборки и бывает, снижает ее качество. Впрочем, что-то производитель точно меняет, так как только за время тестирования робот как минимум дважды обновлял свое ПО. К сожалению, постоянные и непредсказуемые проблемы со связью между клиентской программой, облачным сервисом и роботом снижают пользу от мобильного ПО и удовольствие от использования такого увлекательного и полезного домашнего помощника.
Достоинства:
- Высокая эффективность уборки
- Продвинутая система ориентации и прокладка рационального маршрута уборки
- Как минимум однократное возобновление уборки после подзарядки
- Большая максимальная площадь уборки
- Продуманная конструкция базовой станции
- Ограничение движения с помощью магнитной ленты
- Регулировка мощности вентилятора
- Уборка по расписанию
- Возможность управления и контроля с помощью приложения на мобильном устройстве
Недостатки:
- Полное отсутствие официальной русификации
- Постоянная потеря связи с облачным сервисом, что делает мобильное приложение малополезным
- Бедная комплектация
- Небольшой объем пылесборника





")








